エルステッドは、コンパス針が電流担持導体の近傍で偏向されること、すなわちこの導体がコンパス針に力を発揮することを確立していた。 その後、1821年に、Michael Faradayは、電流を運ぶ導体も磁場中に置かれると偏向されることを発見しました。 これは、磁場とこの電流担持導体がその近傍で互いに力を発揮すると言える。
導体が電流Iを運び、それが長さ(l)であるとします。 それが電流(DC)を運んでいるので、いくつかの磁束線は導体の周りに生成され、それらは導体の中心軸と同心である。 したがって、この導体を通るこの電流のために電磁場が確立されます。
右手の親指のルールに続いて、親指が電流の流れの方向を示すとき、磁束線は曲がった指に沿った方向を得る、すなわち下の図に示す。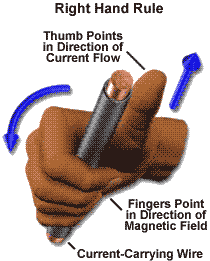
この電流を運ぶ導体は、磁束密度の馬の靴磁石の二つの極の間に配置されています 。 この磁石は地面にしっかりと固定されています。 導体は固定されていない、むしろそれは自由に移動することができます。 導体の長さは、馬の靴の永久的な磁場のちょうど垂直です。
。 この磁石は地面にしっかりと固定されています。 導体は固定されていない、むしろそれは自由に移動することができます。 導体の長さは、馬の靴の永久的な磁場のちょうど垂直です。
したがって、電流と磁場の方向は互いに垂直であることは明らかです。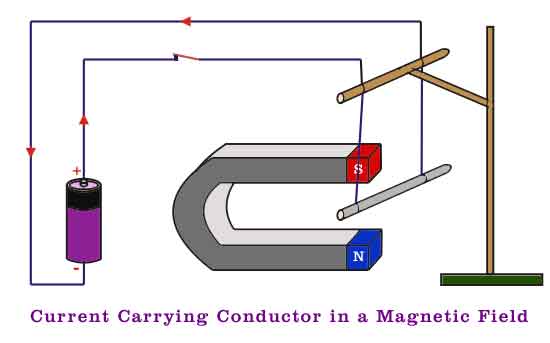
今、二つの磁場(導体による電磁場と馬の靴の磁石による永久磁場)は、それらの作用にあります。
この導体を流れる電流(I)による電磁磁束の同心円は、その状況で永久磁石の磁束を撃退しようとします。力が であると考えてみましょう。
であると考えてみましょう。
ここで、電流の方向は、電流を運ぶ導体(l)の長さの向きに依存するので、ベクトルは長さのみ取られます。 力
 )の外積です。 さて、
)の外積です。 さて、
ここで、θは二つのベクトル間の角度であり、 は二つのベクトル方向に対する垂直方向の力の単位ベクトルです。
は二つのベクトル方向に対する垂直方向の力の単位ベクトルです。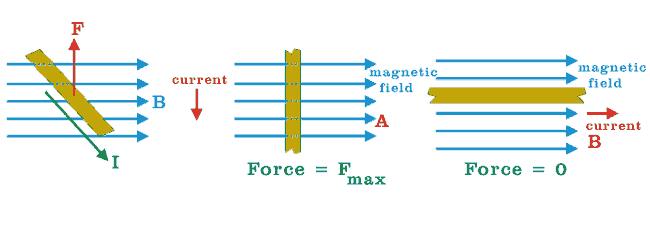
この方向の力で導体が移動します。 この結果は、簡単なルール、すなわちフレミングの左手のルールで単純化することができます。 左手の三本の指を互いに垂直に伸ばすことにより、電流の方向を左手の中指で示し、第二の指が磁束の方向である場合、左手の親指は導体の動きの方向を示す。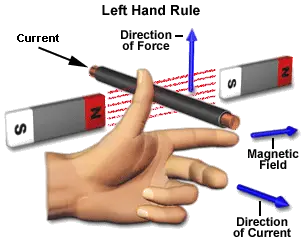
今、この導体を通る電流の方向は、導体が磁石の二つの極の間に配置されている方向の導体に依存 したがって、電流搬送導体は、永久磁石または任意の電磁石の近傍で常に力に直面する。 この現象に基づいて、DCモータが回転します。