외르스테드 설립했다는 나침반이 바늘 가져갔 근처의 현재를 들고 지휘자,즉 이 지휘자 힘이 발휘에 나침반이다. 나중에,1821 년,마이클 패러데이(Michael Faraday)는 전류 운반 도체가 자기장에 놓여지면 편향된다는 것을 발견했습니다. 이것은 자기장과이 전류 운반 도체가 주변에서 서로 힘을 발휘한다고 말할 수 있습니다.
도체가 전류 I 를 전달하고 길이(l)가 있다고 가정합니다. 그것이 현재(DC)를 나르는 때,몇몇 유출 선은 지휘자의 주위에 생성되고 지휘자의 중심 축과 동심입니다. 따라서이 도체를 통해이 전류로 인해 전자기장이 설정됩니다.
다음과 같은 오른쪽 엄지 손가락의 규칙은 자속 줄을 얻는 방향으로 구부린 손가락을 때 엄지손가락을 나타내는 방향 현재의 흐름,즉 아래 그림에 표시된.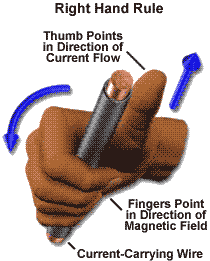
이것은 전류를 운반 지휘자는 배치 사이의 두 개의 기둥의 말이 구두 자석의 자속밀도 . 이 자석은지면에 단단히 고정되어 있습니다. 도체는 고정되어 있지 않고 오히려 자유롭게 움직일 수 있습니다. 도체의 길이는 말 신발의 영구 자기장의 단지 수직이다.따라서 전류와 자기장의 방향이 서로 정상인 것은 분명합니다.
. 이 자석은지면에 단단히 고정되어 있습니다. 도체는 고정되어 있지 않고 오히려 자유롭게 움직일 수 있습니다. 도체의 길이는 말 신발의 영구 자기장의 단지 수직이다.따라서 전류와 자기장의 방향이 서로 정상인 것은 분명합니다.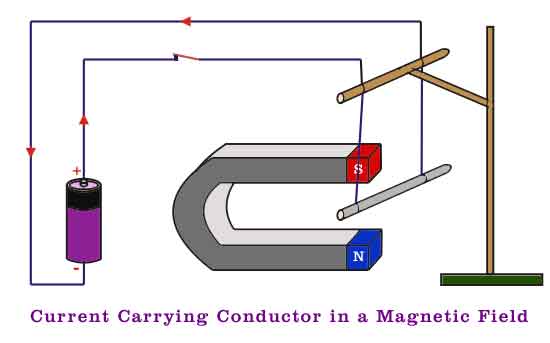
이제 두 개의 자석 분야(전자기장에 의해 지휘자이고 영구적인 자기장에 의해 말 화석)는 자신의 작업입니다.
동심원의 전자파 유량 때문에 흐르는 전류(I)이 지휘자 시을 격퇴하고 자속의 영구 자석에서는 상황이다.
포스가 라고 생각해 봅시다.
라고 생각해 봅시다.
여기에 전류의 방향에 따라 달라집의 방향 길이의 현재를 들고 도체(l),그래서 벡터한 길이다. 힘
 ). 지금
). 지금
여기에,θ 는 각 사이에 두 개의 벡터와 단위 벡터의 힘에 직각 방향으로 존중을 두 벡터의 방향이다.
단위 벡터의 힘에 직각 방향으로 존중을 두 벡터의 방향이다.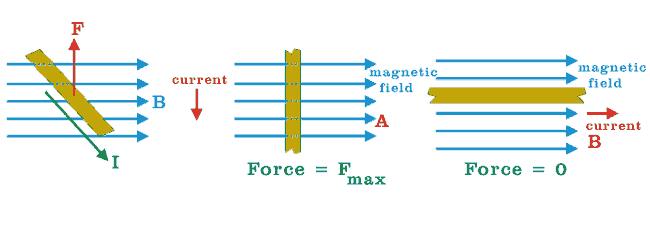
이 힘의 방향으로 도체가 움직일 것입니다. 이 결과물은 쉬운 규칙,즉 플레밍의 왼손 규칙으로 단순화 될 수 있습니다. 에 의해 스트레칭 세 손가락의 왼손을 수직 방식으로 서면의 방향을 현재로 표시된 중간 손가락의 왼쪽과 두 번째 손가락은 방향으로의 자속은 다음의 엄지 손가락을 왼손이의 방향으로 지휘자의 운동입니다.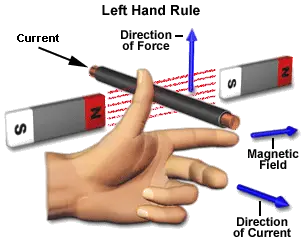
지금의 방향을 통해 현재 이 지휘에 따라 달라집에서 지휘자는 어떤 방향의 지휘자는 배치 사이의 두 극의 자석입니다. 따라서 전류 운반 도체는 항상 영구 자석 또는 모든 전기 자석 부근의 힘에 직면합니다. 이 현상을 기반으로 DC 모터가 회전합니다.나는 이것을 할 수 없다.