limites e infinitesimais
é normalmente desenvolvido trabalhando com quantidades muito pequenas. Historicamente, o primeiro método de fazê-lo foi por infinitesimais. Estes são objetos que podem ser tratados como números reais, mas que são, em algum sentido, infinitamente pequenos. Por exemplo, um número infinitesimal pode ser maior que 0, mas menor que qualquer número na sequência 1, 1/2, 1/3,… e, portanto, menos do que qualquer número real positivo. Deste ponto de vista, o cálculo é uma coleção de técnicas para manipular infinitesimais. Os símbolos d x {\displaystyle dx}

e d y {\displaystyle dy}

foram levados para ser infinitesimal, e a derivada d y / d x {\displaystyle dy/dx}

foi simplesmente a sua relação. a abordagem infinitesimal caiu em desuso no século XIX porque era difícil tornar a noção de um infinitesimal precisa. No entanto, o conceito foi revivido no século XX com a introdução de análise não-padrão e análise infinitesimal suave, que forneceu bases sólidas para a manipulação de infinitesimais.
no final do século XIX, infinitesimais foram substituídos dentro da academia pelo epsilon, abordagem delta aos limites. Limites descrevem o valor de uma função em uma determinada entrada em termos de seus valores em entradas próximas. Eles capturam o comportamento em pequena escala no contexto do sistema de números reais. Neste tratamento, o cálculo é uma coleção de técnicas para manipular certos limites. Infinitesimais são substituídos por números muito pequenos, e o comportamento infinitamente pequeno da função é encontrado tomando o comportamento limitante para números menores e menores. Os limites foram pensados para fornecer uma base mais rigorosa para o cálculo, e por esta razão tornaram-se a abordagem padrão durante o século XX.
cálculo Diferencial

Cálculo Diferencial é o estudo da definição, propriedades e aplicações da derivada de uma função. O processo de encontrar a derivada é chamado de diferenciação. Dada uma função e um ponto no domínio, a derivada nesse ponto é uma forma de codificar o comportamento em pequena escala da função perto desse ponto. Ao encontrar a derivada de uma função em cada ponto de seu domínio, é possível produzir uma nova função, chamada de função derivada ou apenas a derivada da função original. Em termos formais, a derivada é um operador linear que toma uma função como sua entrada e produz uma segunda função como sua saída. Isto é mais abstrato do que muitos dos processos estudados em álgebra elementar, onde as funções normalmente introduzem um número e produzem outro número. Por exemplo, se a função de duplicação é dada a entrada três, então ela produz seis, e se a função quadra é dada a entrada três,então ela produz nove. A derivada, no entanto, pode tomar a função squaring como uma entrada. Isso significa que a derivada obtém todas as informações da função quadrática—como que dois é enviada para quatro, três é enviado para nove, quatro é enviado para dezesseis, e assim por diante—e usa esta informação para produzir outra função. A função produzida pela derivação da função quadratura acaba por ser a função de duplicação.
em termos mais explícitos, a ” função de duplicação “pode ser denotada por g(x) = 2x e a” função quadratura ” por f(x) = x2. O “derivados” assume agora a função f(x), definido pela expressão “x2”, como uma entrada, é que todas as informações—como que dois é enviada para quatro, três é enviado para nove, quatro é enviado para dezesseis, e assim por diante—e usa essa informação para a saída de outra função, a função g(x) = 2x, como vai sair.
O símbolo mais comum para uma derivada é uma marca Tipo apóstrofo chamada prime. Assim, a derivada de uma função chamada f é denotada por f’, pronunciado “f prime”. Por exemplo, se f(x) = x2 é a função quadratura, então f'(x) = 2x é sua derivada (a função de duplicação g de cima). Esta notação é conhecida como notação de Lagrange.
Se a entrada da função representa o tempo, então a derivada representa a mudança em relação ao tempo. Por exemplo, se f é uma função que leva um tempo como entrada e dá a posição de uma bola no tempo em que a saída, então a derivada de f é como a posição está mudando no tempo, isto é, é a velocidade da bola.
Se uma função é linear (isto é, se o gráfico da função é uma reta), então a função pode ser escrita como y = mx + b, onde x é a variável independente, y é a variável dependente, b é o intercepto de y, e:
m = aumento de executar = mudança em y alteração x = ∆ y ∆ x . {\displaystyle m={\frac {\text{origem}}{\text{run}}}={\frac {{\text{alteração }}y}{{\text{alteração }}x}}={\frac {\Delta y}{\Delta x}}.}

isto dá um valor exato para o declive de uma linha reta. Se o grafo da função não é uma linha reta, entretanto, então a mudança em y dividida pela mudança em x varia. Derivatives give an exact meaning to the notion of change in output with respect to change in input. Para ser concreto, seja f uma função, e fixar um ponto a no domínio de F. (A, f(A)) é um ponto no gráfico da função. Se h é um número próximo de zero, então a + h é um número próximo de A. Portanto, (a + h, f (A + h)) é próximo de(A, f (a)). O declive entre estes dois pontos é
m = f ( A + h ) − f ( A) (A + h ) − A = f ( A + h ) − f (A ) H. {\displaystyle m={\frac {f(a+h)-f(a)}{(a+h)-a}}={\frac {f(a+h)-f(a)}{h}}.}

Esta expressão é chamada de quociente de diferença. Uma linha através de dois pontos em uma curva é chamada de linha secante, assim m é o declive da linha secante entre (a, f(A)) e (a + h, f(A + h)). A recta secante é apenas uma aproximação para o comportamento da função no ponto, porque ele não conta para o que acontece entre a e a + h. Não é possível descobrir o comportamento de cada definindo h para zero, pois isso exigiria a divisão por zero, o que é indefinido. A derivada é definida tomando o limite como H tende a zero, o que significa que considera o comportamento de f para todos os pequenos valores de h e extrai um valor consistente para o caso em que h é igual a zero:
lim h → 0 f ( a + h ) − f ( A ) H. {\displaystyle \lim _{h\to 0}{f(a+h)-f (A) \over {h}}.}

Geometricamente, a derivada é a inclinação da reta tangente ao gráfico de f em a. A reta tangente é um limite de rectas secantes assim como a derivada é um limite de diferença de quocientes. Por esta razão, a derivada é às vezes chamada de declive da função F.
aqui está um exemplo particular, a derivada da função quadra na entrada 3. Seja f (x) = x2 a função quadratura.
f ′ ( 3 ) = lim h → 0 ( 3 + h ) 2 − 3 2 h = lim h → 0 9 + 6 h + h 2 − 9 h = lim h → 0 6 h + h 2 h = lim h → 0 ( 6 + h ) = 6 {\displaystyle {\begin{aligned}f'(3)&=\lim _{h\to 0}{(3+h)^{2}-3^{2} \over {h}}\\&=\lim _{h\to 0}{9+6h+h^{2}-9 \over {h}}\\&=\lim _{h\to 0}{6h+h^{2} \over {h}}\\&=\lim _{h\to 0}(6+h)\\&=6\end{aligned}}}

A inclinação da reta tangente à função quadrática no ponto (3, 9) é de 6, isto é, está indo até seis vezes mais rápido do que ele está indo para o direito. O processo limite apenas descrito pode ser realizado para qualquer ponto no domínio da função quadratura. Isto define a função derivada da função quadratura ou apenas a derivada da função quadratura para abreviar. Um cálculo semelhante ao acima mostra que a derivada da função quadratura é a função de duplicação.
Notação Leibniz
uma notação comum, introduzida por Leibniz, para a derivada no exemplo acima é
y = x 2 d y d x = 2 x. {\displaystyle {\begin{alinhado}y&=x^{2}\\{\frac {dy}{dx}}&=2x.\end{alinhado}}}

em uma abordagem baseada em limites, o símbolo dy / dx deve ser interpretado não como o quociente de dois números, mas como uma estenografia para o limite calculado acima. Leibniz, no entanto, tinha a intenção é representar o quociente de dois infinitamente pequenos números, dy, sendo o infinitamente pequena mudança em y causado por um infinitamente pequeno alterar dx aplicada a x. Podemos também pensar em d/dx como um operador de diferenciação, o que leva uma função como uma entrada e dá outra função, a derivada, como o de saída. Por exemplo:
d x (x 2) = 2 x. {\displaystyle {\frac {d}{dx}}(x^{2})=2x.}

neste uso, o dx em que o denominador é lido como “com relação a x”. Outro exemplo de notação correta poderia ser:
g ( t ) = t 2 + 2 t + 4 d d t g ( t ) = 2 t + 2 {\displaystyle {\begin{alinhado}g(t)=t^{2}+2t+4\\\\{d \over dt}g(t)=2t+2\end{alinhado}}}

Mesmo quando o cálculo é desenvolvida através de limites, ao invés de incluir infinitesimais, é comum para manipular símbolos como dx e dy como se fossem números reais; embora seja possível evitar tais manipulações, eles são, por vezes, notationally conveniente expressar operações, tais como o total de derivativos.
Cálculo Integral
cálculo Integral é o estudo das definições, propriedades e aplicações de dois conceitos relacionados, o integral indefinido e o integral definido. O processo de encontrar o valor de uma integral é chamado de integração. Em linguagem técnica, o cálculo integral estuda dois operadores lineares relacionados.
a integral indefinida, também conhecida como a antiderivativa, é a operação inversa à derivada. F é uma integral indefinida de f Quando f é um derivado de F. (This use of lower-and upper-case letters for a function and its indefinite integral is common in calculus.)
The definite integral inputs a function and outputs a number, which gives the algebraic sum of areas between the graph of the input and the x-axis. A definição técnica da integral definida envolve o limite de uma soma de áreas de retângulos, chamada de soma de Riemann.um exemplo motivador são as distâncias percorridas em determinado tempo.
D i s t a n c e = e S p e e d ⋅ T i m e {\displaystyle \mathrm {Distância} =\mathrm {Velocidade} \cdot \mathrm {Tempo} }

Se a velocidade é constante, apenas a multiplicação é necessário, mas se as mudanças de velocidade, um mais poderoso método para encontrar a distância é necessária. Um tal método é aproximado a distância a ser percorrida, dividindo o tempo em pequenos intervalos de tempo, em seguida, multiplicando-se o tempo decorrido em cada intervalo de uma das velocidades no intervalo e, em seguida, tomar a soma (uma soma de Riemann) a distância aproximada percorrida em cada intervalo. A idéia básica é que se apenas um curto período de tempo decorre, então a velocidade permanecerá mais ou menos a mesma. No entanto, uma soma de Riemann só dá uma aproximação da distância percorrida. Temos de tomar o limite de todas as somas de Riemann para encontrar a distância exacta percorrida.
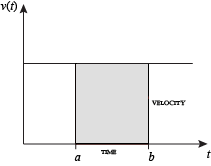

quando a velocidade é constante, a distância total percorrida ao longo do intervalo de tempo indicado pode ser calculada multiplicando a velocidade e o tempo. Por exemplo, viajar a uma velocidade constante de 50 mph durante 3 horas resulta numa distância total de 150 milhas. No diagrama à esquerda, quando velocidade e tempo constantes são graficados, estes dois valores formam um retângulo com altura igual à velocidade e largura iguais ao tempo decorrido. Portanto, o produto da velocidade e do tempo também calcula a área retangular sob a curva de velocidade (constante). Esta conexão entre a área sob uma curva e a distância percorrida pode ser estendida a qualquer região de forma irregular exibindo uma velocidade flutuante ao longo de um determinado período de tempo. Se f(x) no diagrama da direita representa a velocidade que varia com o tempo, a distância percorrida (entre os tempos representados por a e b) é a área da região sombreada s.
Para se aproximar de uma área, um método intuitivo seria dividir a distância entre a e b em um número de segmentos iguais, o comprimento de cada segmento representado pelo símbolo Δx. Para cada pequeno segmento, podemos escolher um valor da função f (x). Chamar esse valor h. Então a área do retângulo com base Δx e altura h dá a distância (tempo Δx multiplicado pela velocidade h) percorrida nesse segmento. Associado a cada segmento é o valor médio da função acima, f(x) = h. A soma de todos os retângulos dá uma aproximação da área entre o eixo e a curva, que é uma aproximação da distância total percorrida. Um valor menor para Δx dará mais retângulos e, na maioria dos casos, uma melhor aproximação, mas para uma resposta exata precisamos tomar um limite à medida que Δx se aproxima de zero.
O símbolo de integração é ∫ {\displaystyle \int }

, um S alongado (o S significa “soma”). A integral definida é escrita como: ∫ a b f (x )d X. {\displaystyle \int _{a}^{b}f (x)\,dx.}

e é lido “a integral de A A b de f-de-x em relação a X.” A notação de Leibniz dx pretende sugerir a divisão da área sob a curva em um número infinito de retângulos, de modo que sua largura Δx se torna o infinitesimalmente pequeno dx. Em uma formulação do cálculo com base no limite, a notação
∫ a b ⋯ d x {\displaystyle \int _{a}^{b}\cdots \,dx}

é para ser entendido como um operador que leva uma função como entrada e produz um número, área, como uma saída. O diferencial de terminação, dx, não é um número, e não está sendo multiplicado por f(x), embora, servindo como um lembrete da definição de limite Δx, ele pode ser tratado como tal em manipulações simbólicas da integral. Formalmente, o diferencial indica a variável sobre a qual a função está integrada e serve como suporte de fecho para o operador de integração.
a integral indefinida, ou antiderivativa, é escrita:
∫ f ( x ) d X. {\displaystyle \int f (x)\,dx.}

funções diferentes por apenas uma constante têm a mesma derivada, e pode ser mostrado que o antiderivante de uma dada função é realmente uma família de funções diferentes apenas por uma constante. Uma vez que a derivada da função y = x2 + C, onde C é qualquer constante, é y’ = 2x, o antiderivante deste último é dado por:
∫ 2 x d x = x 2 + C. {\displaystyle \int 2x\,dx=x^{2}+C.}

A não especificado constante C presente na primitiva ou antiderivada é conhecido como a constante de integração.
Teorema Fundamental
o teorema fundamental do cálculo afirma que a diferenciação e integração São operações inversas. Mais precisamente, relaciona os valores de antiderivantes com Integrais Definidos. Como é geralmente mais fácil computar um antiderivativo do que aplicar a definição de uma integral definida, o teorema fundamental do cálculo fornece uma forma prática de computar integrais definidas. Pode também ser interpretado como uma afirmação precisa do facto de que a diferenciação é o inverso da integração.
O teorema fundamental dos estados do cálculo: Se uma função f é contínua no intervalo e se F é uma função cuja derivada é f no intervalo (a, b), então
∫ A B f ( x ) d x = F ( b ) − F ( A ) . {\displaystyle \int _{a}^{b}f(x)\,dx=F(b)-F (a).}

além disso, para cada x no intervalo (a, b),
D x ∫ A x f ( t ) D T = f ( x ) . {\displaystyle {\frac {d}{dx}} \ int _{a}^{x}f(t)\,dt=f (x).}

Esta realização, feita por Newton e Leibniz, que baseou os seus resultados em trabalhos anteriores de Isaac Barrow, foi fundamental para a proliferação de resultados analíticos após o seu trabalho se tornar conhecido. The fundamental theorem provides an algebraic method of computing many definite integrals-without performing limit processes-by finding formulas for antiderivatives. É também um protótipo de solução de uma equação diferencial. Equações diferenciais relacionam uma função desconhecida com seus derivados, e são onipresentes nas ciências.