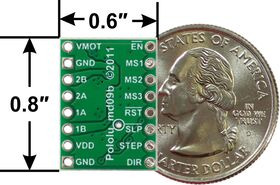
A4983/A4988 motor de passo motorista portador de dimensões.
Overview
Este produto é um carrier board ou breakout board para Allegro ‘ s A4988 DMOS Microstepping Driver with Translator and Overcurrent Protection; por isso, recomendamos uma leitura cuidadosa da datasheet A4988 (1MB pdf) antes de usar este produto. Este condutor de Motor stepper permite-lhe controlar um motor bipolar stepper a até 2 uma corrente de saída por bobina (ver as considerações de Dissipação De Potência abaixo para mais informações). Aqui estão algumas das principais características do driver:
- interface simples de passo e controlo de direcção
- Ajustável de corrente de controle permite que você defina a corrente máxima de saída com um potenciômetro, que permite que você use tensões acima de seu motor deslizante de nível de tensão para alcançar um maior passo taxas
- Inteligente cortar controle que seleciona automaticamente o correto atual modo de decaimento (rápido decaimento lento ou decadência)
- Sobre a temperatura de desligamento térmico, sob-tensão de bloqueio, e o cruzamento de corrente de proteção
- Curto-terra e em curto-circuito-proteção da carga
cinco resoluções de passos diferentes: completo-passo, de meio-passo, quartas-de-passo, para a oitava etapa, e xvi-passo
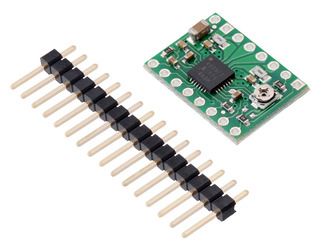
Este produto é fornecido com todos superfície de montagem componentes—incluindo o CI condutor A4988-instalados como indicado na imagem do produto.
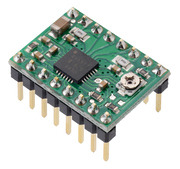
Este produto é embalado individualmente com pinos de cabeçalho masculino 0. 1 ” incluídos, mas não solderados; nós também carregamos uma versão com pinos de cabeçalho masculino já soldered dentro. Para os clientes interessados em volumes mais elevados a custos unitários mais baixos, oferecemos uma versão embalada a granel sem cabeçotes e uma versão embalada a granel com cabeçotes instalados.
Note que nós carregamos vários drivers de motor estepador que podem ser usados como alternativas para este módulo (e substituições drop-in em muitas aplicações):
- a versão preta A4988 stepper motor driver carrier is available with approximately 20% better performance; except for thermal characteristics, the Black Edition and this (green) board are intercambiable.
- a portadora MP6500 pode fornecer até 1,5 A por fase (contínua) sem um dissipador de calor e está disponível em duas versões, uma com um pote para controlar o limite atual e outra com controle de limite de corrente digital para ajuste de limite de corrente dinâmica por um microcontrolador.
- a portadora DRV8825 oferece aproximadamente 50% de melhor desempenho em uma gama de tensão mais ampla e tem algumas características adicionais.o transportador DRV8834 funciona com voltagens de alimentação a motor até 2,5 V, o que o torna adequado para aplicações de baixa tensão.
- a portadora DRV8880 oferece limitação dinamicamente escalável da corrente e “AutoTune”, que seleciona automaticamente o modo de decaimento de cada ciclo PWM para o melhor desempenho de regulação atual baseado em fatores como a resistência e indutância do enrolamento motor e a velocidade e carga dinâmicas do motor.
também vendemos uma versão maior da portadora A4988 que tem proteção de energia reversa sobre a entrada de energia principal e reguladores de tensão embutidos 5 V e 3.3 V que eliminam a necessidade de lógica separada e fontes de motor.alguns motores estepadores unipolares (por exemplo, aqueles com seis ou oito condutores) podem ser controlados por este condutor como motores estepadores bipolares. Para mais informações, consulte as perguntas mais frequentes. Motores unipolares com cinco cabos não podem ser usados com este condutor.
Included hardware
The A4988 stepper motor driver carrier comes with one 1×16-pin breakaway 0.1 ” male header. Os cabeçalhos podem ser soldar para uso com placas de pão soldas ou conectores femininos de 0.1″. Você também pode soldar suas pistas motoras e outras conexões diretamente para o tabuleiro. (Uma versão deste tabuleiro com cabeçalhos já instalados também está disponível.)
|
|
|
Usando o driver
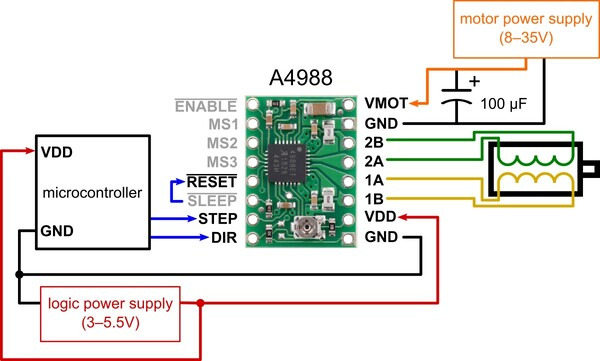
Mínimo de diagrama de fiação para conexão de um microcontrolador a um A4988 motor de passo motorista portador (completo-modo de passo).
ligações de energia
o condutor requer uma tensão de alimentação lógica (3 – 5.5 V) A Ligar através dos pinos VDD e GND e uma tensão de alimentação do motor (8 – 35 V) A Ligar através do VMOT e do GND. Estes fornecimentos devem ter condensadores de dissociação adequados próximos do tabuleiro e devem ser capazes de fornecer as correntes esperadas (picos até 4 A para a alimentação do motor).Aviso: Esta placa de suporte utiliza condensadores cerâmicos de baixa ESR, o que a torna suscetível a picos de tensão LC destrutivos, especialmente quando usando cabos de potência mais longos do que alguns centímetros. Sob certas condições, estes picos podem exceder a 35 V tensão máxima de classificação para o A4988 e danificar permanentemente o conselho de administração, mesmo quando o motor de alimentação de tensão é 12 V. Uma forma de proteger o condutor de tais picos é colocar uma grande (pelo menos 47 µF) capacitor eletrolítico toda a potência do motor (VMOT) e a terra em algum lugar perto do tabuleiro.
motor connections
Four, six, and eight-wire stepper motors can be driven by the A4988 if they are properly connected; a FAQ response explains the proper wirings in detail.advertência: Ligar ou desligar um motor de estepe enquanto o condutor é alimentado pode destruir o condutor. (Mais geralmente, rebobinar qualquer coisa enquanto é alimentado é pedir problemas.)
Step (and microstep) size
Stepper motors typically have a step size specification (e.g. 1.8° or 200 steps per revolution), which applies to full steps. Um driver de microestepamento, como o A4988, permite resoluções mais elevadas, permitindo localizações de etapas intermediárias, que são conseguidas energizando as bobinas com níveis de corrente intermediária. Por exemplo, a condução de um motor em Modo de quarto passo dará ao motor de 200 passos por revolução 800 micro passos por revolução, usando quatro diferentes níveis atuais.
As entradas do seletor de resolução (tamanho do passo) (MS1, MS2 e MS3) permitem a seleção a partir das resoluções de cinco etapas de acordo com a tabela abaixo. MS1 e MS3 têm resistências internas de 100kΩ e MS2 tem uma resistência interna de 50kΩ, Então deixando estes três pinos de seleção de microstep desconectados resultados em Modo de passo completo. Para que os modos microstep funcionem corretamente, o limite atual deve ser definido baixo o suficiente (ver abaixo) para que a limitação da corrente seja ativada. Caso contrário, os níveis intermédios de corrente não serão mantidos correctamente, e o motor saltará os micro-passos.
| MS1 | MS2 | MS3 | Microstep de Resolução |
|---|---|---|---|
| Baixo | Baixo | Baixo | Total passo |
| Alta | Baixo | Baixo | Meio passo |
| Baixo | Alta | Baixo | Quarto passo |
| Alta | Alta | Baixo | Oitavo passo |
| Alta | Alta | Alta | décimo sexto passo |
entradas de Controle
Cada pulso para a ETAPA de entrada corresponde a uma microstep do motor estepador na direcção seleccionada pelo PIN DIR. Note que os pinos STEP E DIR não são puxados para qualquer tensão particular internamente, então você não deve deixar nenhum destes pinos flutuando em sua aplicação. Se você só quer rotação em uma única direção, você pode amarrar DIR diretamente para VCC ou GND. O chip tem três entradas diferentes para controlar seus muitos estados de poder: RST, SLP e EN. Para mais detalhes sobre estes estados de poder, consulte a ficha técnica. Por favor, note que o primeiro pino está flutuando; se você não estiver usando o pin, você pode conectá-lo ao pin SLP adjacente no PCB para trazê-lo alto e ativar o tabuleiro.
limite de corrente
uma maneira de maximizar o desempenho motor do estepador é usar uma tensão tão alta quanto é prático para a sua aplicação. Em particular, o aumento da tensão geralmente permite maiores taxas de passo e torque passo, uma vez que a corrente pode mudar mais rapidamente nas bobinas após cada passo. No entanto, a fim de utilizar com segurança tensões acima da tensão nominal de um motor estepador, a corrente da bobina deve ser activamente limitada para evitar que exceda a corrente nominal do motor.
O A4988 suporta tal limitação de corrente activa, e o potenciômetro aparador no tabuleiro pode ser usado para definir o limite de corrente. Uma maneira de definir o limite de corrente é colocar o condutor em Modo de passo completo e medir a corrente que passa por uma única bobina de motor, ajustando ao mesmo tempo o potenciómetro limite de corrente. Isto deve ser feito com o motor mantendo uma posição fixa (i.e. sem bloquear a entrada do degrau). Note que o kernel que você está medindo é de apenas 70% da atual definição de limite, uma vez que ambas as bobinas são sempre ligado e limitado a este valor total-modo de passo, então, se você ativar mais tarde modos de micro-passo, a corrente através das bobinas será capaz de superar essa medida completa-etapa atual é de 40% (1/0.7) em determinadas etapas; por favor, leve isso em conta quando utilizar este método para definir o limite de corrente. Além disso, note que você vai precisar realizar este ajuste novamente se você alguma vez mudar a tensão Lógica, Vdd, uma vez que a tensão de referência que define o limite de corrente é uma função de Vdd.
Nota: A corrente da bobina pode ser muito diferente da Corrente de alimentação, por isso não deve usar a corrente medida na fonte de alimentação para definir o limite de corrente. O lugar apropriado para colocar o seu medidor atual está em série com uma das suas bobinas de motor estepador.
outra forma de definir o limite de corrente é calcular a tensão de referência que corresponde ao limite de corrente desejado e ajustar então o potenciômetro limite de corrente até que você medir essa tensão no pin de VREF. A tensão do pino VREF é acessível em uma via que é circulada no ecrã Silk inferior da placa de circuito. O limite de corrente, IMAX, relaciona-se com a tensão de referência da seguinte forma:
`I_(MAX.) = (V_(REF)) / (8 * R_(CS))`
ou, reorganizados para resolver para VREF:
`V_(REF) = 8 * I_(MAX.) * R_(CS)`
RCS é o sentido atual da resistência; as versões originais desta placa usavam resistências de sentido atual 0,050 Ω, mas nós mudamos para usar resistências de sentido atual 0,068 Ω em janeiro de 2017, o que torna mais útil a gama do potenciômetro de ajuste. A imagem a seguir mostra como identificar o sentido atual resistores de seu conselho de administração tem:
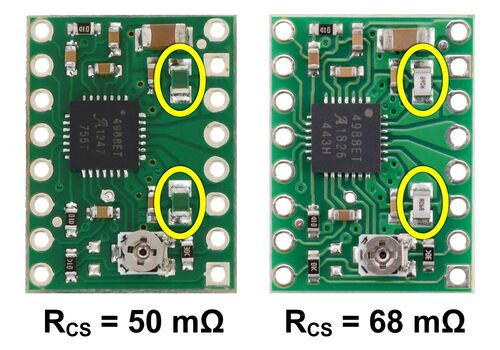
a Identificação do original 50 mΩ sentido resistores (esquerda) e 68 mΩ sentido resistores (direita), introduzida em janeiro de 2017.
assim, por exemplo, se você quiser definir o limite atual para 1 A e você tem uma placa com resistências de Sentido 68 mΩ, você iria definir VREF para 540 mV. Isso assegura que mesmo que a corrente através de cada bobina de mudança de passo a passo, a magnitude da corrente do vetor no motor permanece constante em 1 A:
`sqrt(I_(COIL1)^2 + I_(COIL2)^2) = I_(MAX) = 1 texto (Um)`
Se você desejar que a corrente através de cada bobina para ser 1 Um inteiro modo de passo, você precisará definir o limite de corrente a ser 40% maior, ou de 1.4 A, uma vez que as bobinas são limitadas a aproximadamente 70% do limite de corrente definido no modo de passo completo (a equação acima mostra por que isso é o caso). Para fazer isso com uma placa com 68 resistências sensoriais mΩ, você colocaria VREF para 770 mV.
considerações de dissipação de potência
o driver IC A4988 tem uma taxa de corrente máxima de 2 A por bobina, mas a corrente real que você pode fornecer depende de quão bem você pode manter o IC frio. A placa de circuito impresso da portadora é projetada para extrair calor do IC, mas para fornecer mais de aproximadamente 1 A por bobina, um dissipador de calor ou outro método de arrefecimento é necessário.este produto pode ficar quente o suficiente para queimá-lo muito antes que o chip sobreaqueça. Tenha cuidado ao manusear este produto e outros componentes ligados a ele.
Por Favor, note que medir a corrente na fonte de alimentação geralmente não fornece uma medida precisa da corrente da bobina. Uma vez que a tensão de entrada para o condutor pode ser significativamente maior do que a tensão da bobina, a corrente medida na fonte de alimentação pode ser um pouco mais baixa do que a corrente da bobina (o condutor e a bobina basicamente agem como uma fonte de energia de comutação para baixo). Além disso, se a tensão de alimentação for muito alta em comparação com o que o motor precisa para alcançar a corrente definida, o ciclo de funcionamento será muito baixo, o que também leva a diferenças significativas entre correntes médias e RMS.
diagrama Esquemático
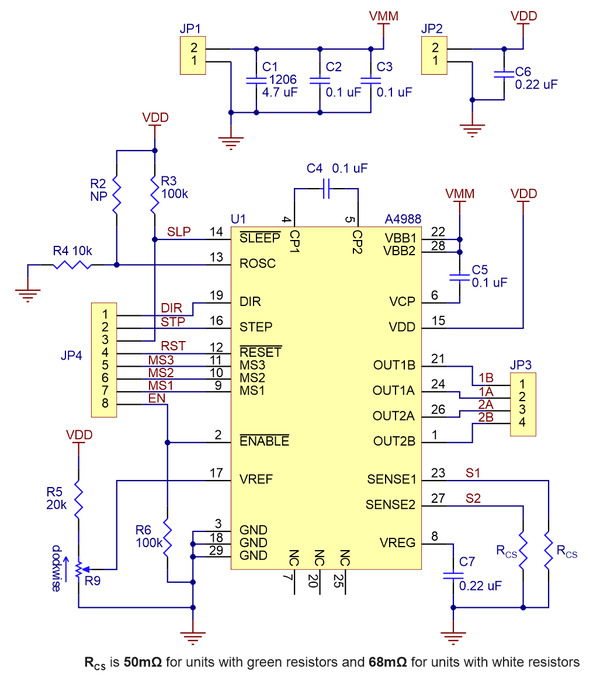
diagrama Esquemático do A4988 motor de passo motorista portador (verde e preto-edições).
Nota: Esta placa é uma substituição drop-in para o nosso original (e agora descontinuado) a4983 stepper motor driver carrier. O mais novo A4988 oferece proteção sobreintensidade e tem uma atração interna de 100k no PIN de seleção do MS1, mas é praticamente idêntico ao A4983.