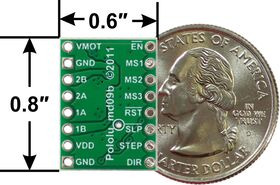
Support de pilote de moteur pas à pas A4983 / A4988 avec dimensions.
Vue d’ensemble
Ce produit est une carte porteuse ou une carte de dérivation pour le pilote de Micro-démarrage DMOS A4988 d’Allegro avec Traducteur et protection contre les surintensités; nous recommandons donc une lecture attentive de la fiche technique A4988 (PDF de 1 Mo) avant d’utiliser ce produit. Ce pilote de moteur pas à pas vous permet de contrôler un moteur pas à pas bipolaire jusqu’à un courant de sortie de 2 A par bobine (voir la section Considérations sur la dissipation de puissance ci-dessous pour plus d’informations). Voici quelques-unes des principales caractéristiques du pilote:
- Interface simple de contrôle de pas et de direction
- Cinq résolutions de pas différentes: la commande de courant réglable à pas complet, demi-pas, quart de pas, huitième et seizième pas vous permet de régler la sortie de courant maximale à l’aide d’un potentiomètre, ce qui vous permet d’utiliser des tensions supérieures à la tension nominale de votre moteur pas à pas pour obtenir des taux de pas plus élevés
- Commande de découpage intelligente qui sélectionne automatiquement le mode de décroissance du courant correct (décroissance rapide ou lente)
- Arrêt thermique de surchauffe, verrouillage de sous-tension et protection contre les courants croisés
- Court-circuit à la terre et court-circuit – protection de charge
Ce produit est livré avec tous les supports en surface composants — y compris le circuit intégré du pilote A4988 – installés comme indiqué sur l’image du produit.
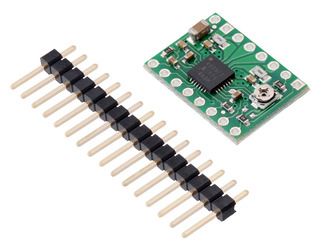
Ce produit est livré emballé individuellement avec des broches d’en-tête mâles de 0,1 « incluses mais non soudées; nous proposons également une version avec des broches d’en-tête mâles déjà soudées. Pour les clients intéressés par des volumes plus élevés à des coûts unitaires inférieurs, nous proposons une version packagée en vrac sans broches d’en-tête et une version packagée en vrac avec des broches d’en-tête installées.
Notez que nous avons plusieurs pilotes de moteur pas à pas qui peuvent être utilisés comme alternatives pour ce module (et remplacements drop-in dans de nombreuses applications):
- Le porte-pilote de moteur pas à pas Black Edition A4988 est disponible avec des performances supérieures d’environ 20%; à l’exception des caractéristiques thermiques, la Black Edition et cette carte (verte) sont interchangeables.
- Le support MP6500 peut délivrer jusqu’à 1,5 A par phase (continue) sans dissipateur thermique et est disponible en deux versions, l’une avec un pot pour contrôler la limite de courant et l’autre avec contrôle numérique de la limite de courant pour un réglage dynamique de la limite de courant par un microcontrôleur.
- La porteuse DRV8825 offre environ 50% de meilleures performances sur une plage de tension plus large et possède quelques fonctionnalités supplémentaires.
- Le support DRV8834 fonctionne avec des tensions d’alimentation du moteur aussi basses que 2,5 V, ce qui le rend adapté aux applications à basse tension.
- Le support DRV8880 offre une limitation de courant évolutive dynamique et une « AutoTune », qui sélectionne automatiquement le mode de décroissance à chaque cycle PWM pour des performances de régulation de courant optimales en fonction de facteurs tels que la résistance et l’inductance de l’enroulement du moteur et la vitesse et la charge dynamiques du moteur.
Nous vendons également une version plus grande du support A4988 qui dispose d’une protection contre l’inversion de l’alimentation sur l’entrée d’alimentation principale et de régulateurs de tension 5 V et 3,3 V intégrés qui éliminent le besoin d’alimentations logiques et de moteurs séparées.
Certains moteurs pas à pas unipolaires (par exemple ceux à six ou huit fils) peuvent être commandés par ce pilote en tant que moteurs pas à pas bipolaires. Pour plus d’informations, veuillez consulter la foire aux questions. Les moteurs unipolaires à cinq fils ne peuvent pas être utilisés avec ce pilote.
Matériel inclus
Le porte-pilote de moteur pas à pas A4988 est livré avec un en-tête mâle 0,1 « à 1 × 16 broches. Les en-têtes peuvent être soudés pour une utilisation avec des planches à pain sans soudure ou des connecteurs femelles de 0,1 « . Vous pouvez également souder vos fils de moteur et d’autres connexions directement sur la carte. (Une version de cette carte avec des en-têtes déjà installés est également disponible.)
|
|
Utilisation du pilote
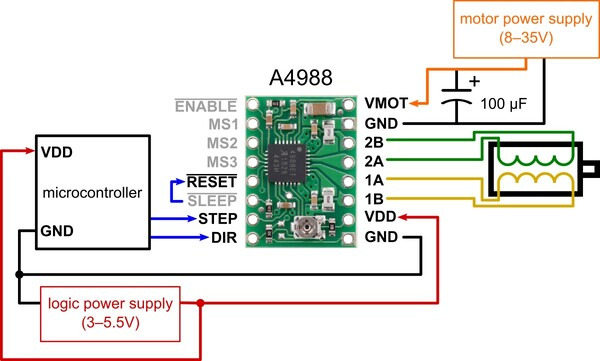
Schéma de câblage minimal pour connecter un microcontrôleur à un support de pilote de moteur pas à pas A4988 (mode pas à pas complet).
Connexions d’alimentation
Le pilote nécessite une tension d’alimentation logique (3 – 5.5 V) à connecter sur les broches VDD et GND et une tension d’alimentation du moteur (8 – 35 V) à connecter sur VMOT et GND. Ces alimentations doivent avoir des condensateurs de découplage appropriés à proximité de la carte, et elles doivent être capables de délivrer les courants attendus (pics jusqu’à 4 A pour l’alimentation du moteur).
Avertissement: Cette carte porteuse utilise des condensateurs en céramique à faible ESR, ce qui la rend sensible aux pics de tension LC destructeurs, en particulier lors de l’utilisation de câbles d’alimentation de plus de quelques pouces. Dans les bonnes conditions, ces pointes peuvent dépasser la tension nominale maximale de 35 V pour l’A4988 et endommager de manière permanente la carte, même lorsque la tension d’alimentation du moteur est aussi basse que 12 V. Une façon de protéger le conducteur de telles pointes consiste à placer un condensateur électrolytique de grande taille (au moins 47 µF) à travers la puissance du moteur (VMOT) et la masse quelque part près de la carte.
Connexions moteur
Les moteurs pas à pas à quatre, six et huit fils peuvent être entraînés par l’A4988 s’ils sont correctement connectés; une réponse à la FAQ explique en détail les câblages appropriés.
Avertissement: Connecter ou déconnecter un moteur pas à pas pendant que le conducteur est alimenté peut détruire le conducteur. (Plus généralement, recâbler n’importe quoi pendant qu’il est alimenté demande des problèmes.)
Taille de pas (et de micro-pas)
Les moteurs pas à pas ont généralement une spécification de taille de pas (par exemple 1,8 ° ou 200 pas par tour), qui s’applique aux pas complets. Un pilote de micro-démarrage tel que l’A4988 permet des résolutions plus élevées en permettant des emplacements de pas intermédiaires, qui sont obtenus en alimentant les bobines avec des niveaux de courant intermédiaires. Par exemple, l’entraînement d’un moteur en mode quart d’étape donnera au moteur à 200 pas par tour 800 micro-pas par tour en utilisant quatre niveaux de courant différents.
Les entrées du sélecteur de résolution (taille de pas) (MS1, MS2 et MS3) permettent la sélection parmi les cinq résolutions de pas selon le tableau ci-dessous. MS1 et MS3 ont des résistances déroulantes internes de 100kΩ et MS2 a une résistance déroulante interne de 50kΩ, de sorte que le fait de laisser ces trois broches de sélection microstep déconnectées entraîne un mode pas à pas complet. Pour que les modes microstep fonctionnent correctement, la limite de courant doit être suffisamment basse (voir ci-dessous) pour que la limitation de courant soit enclenchée. Sinon, les niveaux de courant intermédiaires ne seront pas correctement maintenus et le moteur sautera des micro-étapes.
| MS1 | MS2 | MS3 | Résolution microstep |
|---|---|---|---|
| Faible | Faible | Faible | Pas complet |
| Élevé | Faible | Bas | Demi-marche |
| Bas | Haut | Bas | Quart de marche |
| Haut | Bas | Huitième marche | |
| Haut | Bas | >High | Seizième étape |
Entrées de commande
Chaque impulsion à l’entrée de PAS correspond à un micro-pas de la moteur pas à pas dans la direction sélectionnée par la broche DIR. Notez que les broches STEP et DIR ne sont pas tirées à une tension particulière en interne, vous ne devez donc pas laisser ces broches flotter dans votre application. Si vous voulez juste une rotation dans une seule direction, vous pouvez lier DIR directement à VCC ou GND. La puce dispose de trois entrées différentes pour contrôler ses nombreux états de puissance: RST, SLP et EN. Pour plus de détails sur ces états d’alimentation, consultez la fiche technique. Veuillez noter que la première broche est flottante; si vous n’utilisez pas la broche, vous pouvez la connecter à la broche SLP adjacente sur le circuit imprimé pour l’amener haut et activer la carte.
Limitation de courant
Une façon de maximiser les performances du moteur pas à pas consiste à utiliser une tension aussi élevée que possible pour votre application. En particulier, l’augmentation de la tension permet généralement des vitesses de pas et un couple de pas plus élevés car le courant peut changer plus rapidement dans les bobines après chaque pas. Cependant, afin d’utiliser en toute sécurité des tensions supérieures à la tension nominale d’un moteur pas à pas, le courant de la bobine doit être activement limité pour l’empêcher de dépasser le courant nominal du moteur.
L’A4988 prend en charge une telle limitation de courant active, et le potentiomètre de coupe sur la carte peut être utilisé pour régler la limite de courant. Une façon de régler la limite de courant consiste à mettre le pilote en mode pas à pas et à mesurer le courant traversant une seule bobine de moteur tout en ajustant le potentiomètre de limite de courant. Cela doit être fait avec le moteur en position fixe (c.-à-d. sans cadencer l’entrée de PAS). Notez que le courant que vous mesurez ne représente que 70% du réglage actuel de la limite de courant, car les deux bobines sont toujours allumées et limitées à cette valeur en mode pas complet, donc si vous activez ultérieurement les modes de micro-saut, le courant traversant les bobines pourra dépasser ce courant pas complet mesuré de 40% (1/0,7) sur certaines étapes; veuillez en tenir compte lorsque vous utilisez cette méthode pour définir la limite de courant. Notez également que vous devrez effectuer à nouveau cet ajustement si vous changez jamais la tension logique, Vdd, car la tension de référence qui définit la limite de courant est une fonction de Vdd.
Remarque: Le courant de la bobine peut être très différent du courant d’alimentation, vous ne devez donc pas utiliser le courant mesuré à l’alimentation pour définir la limite de courant. L’endroit approprié pour mettre votre compteur de courant est en série avec l’une de vos bobines de moteur pas à pas.
Une autre façon de définir la limite de courant consiste à calculer la tension de référence qui correspond à la limite de courant souhaitée, puis à ajuster le potentiomètre de limite de courant jusqu’à ce que vous mesuriez cette tension sur la broche VREF. La tension de la broche VREF est accessible sur un via qui est encerclé sur la sérigraphie inférieure de la carte de circuit imprimé. La limite de courant, IMAX, se rapporte à la tension de référence comme suit :
`I_(MAX)=(V_(REF))/(8*R_(CS))`
ou, réarrangée pour résoudre pour VREF :
« V_(REF) = 8*I_(MAX)*R_`CS) »
RCS est la résistance de détection de courant; les versions originales de cette carte utilisaient des résistances de détection de courant de 0,050 Ω, mais nous sommes passés à l’utilisation de résistances de détection de courant de 0,068 Ω en janvier 2017, ce qui rend plus utile la plage du potentiomètre de réglage. L’image suivante montre comment identifier les résistances de détection de courant de votre carte:
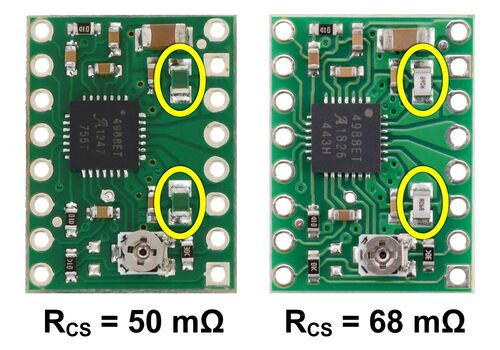
Identification des résistances de détection originales de 50 mΩ (à gauche) et de 68 mΩ (à droite) introduites en janvier 2017.
Ainsi, par exemple, si vous souhaitez définir la limite de courant à 1 A et que vous avez une carte avec des résistances de détection de 68 mΩ, vous définissez VREF sur 540 mV. Cela garantit que même si le courant traversant chaque bobine change d’étape en étape, l’amplitude du vecteur de courant dans le moteur pas à pas reste constante à 1 A:
`sqrt(I_(COIL1)^2 + I_(COIL2)^2) = I_(MAX) = 1 text(A)`
Si vous souhaitez à la place que le courant traversant chaque bobine soit de 1 A en mode pas complet, vous devrez définir la limite de courant pour qu’elle soit 40% plus élevée, ou 1.4a, puisque les bobines sont limitées à environ 70% de la limite de courant réglée en mode pas à pas (l’équation ci-dessus montre pourquoi c’est le cas). Pour ce faire avec une carte avec des résistances de détection de 68 mΩ, vous devez régler VREF à 770 mV.
Considérations relatives à la dissipation de puissance
Le circuit intégré du pilote A4988 a un courant nominal maximal de 2 A par bobine, mais le courant réel que vous pouvez fournir dépend de la façon dont vous pouvez garder le circuit intégré au frais. La carte de circuit imprimé du support est conçue pour extraire la chaleur du circuit intégré, mais pour fournir plus d’environ 1 A par bobine, un dissipateur de chaleur ou une autre méthode de refroidissement est nécessaire.
Ce produit peut devenir assez chaud pour vous brûler longtemps avant que la puce ne surchauffe. Faites attention lors de la manipulation de ce produit et des autres composants qui y sont connectés.
Veuillez noter que la mesure de la consommation de courant au niveau de l’alimentation ne fournit généralement pas une mesure précise du courant de la bobine. Étant donné que la tension d’entrée du pilote peut être nettement supérieure à la tension de la bobine, le courant mesuré sur l’alimentation peut être un peu inférieur au courant de la bobine (le pilote et la bobine agissent essentiellement comme une alimentation abaisseur de commutation). De plus, si la tension d’alimentation est très élevée par rapport à ce dont le moteur a besoin pour atteindre le courant de consigne, le rapport cyclique sera très faible, ce qui entraînera également des différences significatives entre les courants moyens et efficaces.
Schéma
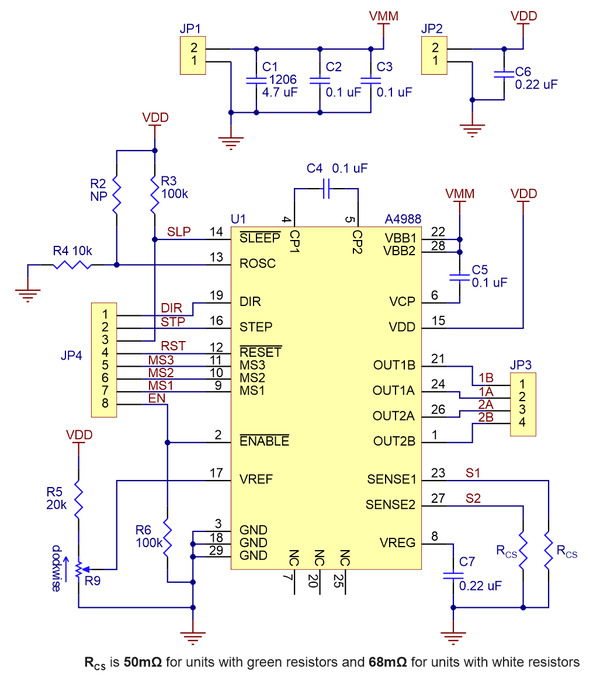
Schéma du porte-pilote du moteur pas à pas A4988 (éditions verte et noire).
Remarque: Cette carte remplace notre porte-pilote de moteur pas à pas A4983 d’origine (et maintenant abandonné). Le plus récent A4988 offre une protection contre les surintensités et dispose d’un pull-down interne de 100k sur la broche de sélection MS1 microstep, mais il est par ailleurs pratiquement identique à l’A4983.