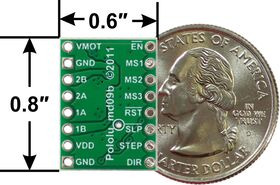
portaherramientas de motor paso a paso A4983/A4988 con dimensiones.
Descripción general
Este producto es una placa portadora o placa de conexión para el controlador de Microstepping DMOS A4988 de Allegro con Traductor y Protección contra sobrecorriente; por lo tanto, recomendamos leer cuidadosamente la hoja de datos A4988 (1 MB pdf) antes de usar este producto. Este controlador de motor paso a paso le permite controlar un motor paso a paso bipolar a una corriente de salida de hasta 2 A por bobina (consulte la sección Consideraciones sobre disipación de potencia a continuación para obtener más información). Estas son algunas de las características clave del controlador:
- Interfaz de control de dirección y paso simple
- Cinco resoluciones de paso diferentes: Control de corriente ajustable de paso completo, medio paso, cuarto de paso, octavo paso y decimosexto
- El control de corriente ajustable le permite establecer la salida de corriente máxima con un potenciómetro, que le permite usar voltajes por encima de la tensión nominal de su motor paso a paso para lograr velocidades de paso más altas
- Control inteligente de corte que selecciona automáticamente el modo de decaimiento de corriente correcto (decaimiento rápido o decaimiento lento)
- Apagado térmico de sobrecalentamiento, bloqueo de bajo voltaje y protección de corriente cruzada
- protección de carga en cortocircuito
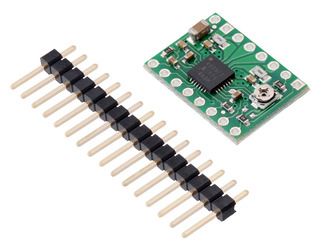
Este producto se envía con montaje en superficie componentes, incluido el CI del controlador A4988, instalados como se muestra en la imagen del producto.
Este producto se envía empaquetado individualmente con pines de cabecera macho de 0.1″ incluidos, pero no soldados; también tenemos una versión con pines de cabecera macho ya soldados. Para los clientes interesados en volúmenes más altos a costos unitarios más bajos, ofrecemos una versión empaquetada a granel sin pines de cabecera y una versión empaquetada a granel con pines de cabecera instalados.
Tenga en cuenta que tenemos varios controladores de motor paso a paso que se pueden usar como alternativas para este módulo (y reemplazos directos en muchas aplicaciones):
- El portaherramientas con motor paso a paso Black Edition A4988 está disponible con aproximadamente un 20% de mejor rendimiento; excepto por las características térmicas, la Black Edition y esta placa (verde) son intercambiables.
- La portadora MP6500 puede suministrar hasta 1,5 A por fase (continua) sin disipador de calor y está disponible en dos versiones, una con un pote para controlar el límite de corriente y otra con control de límite de corriente digital para ajustar el límite de corriente dinámico mediante un microcontrolador.
- La portadora DRV8825 ofrece aproximadamente un 50% de mejor rendimiento en un rango de voltaje más amplio y tiene algunas características adicionales.
- El portador DRV8834 funciona con voltajes de alimentación del motor de tan solo 2,5 V, lo que lo hace adecuado para aplicaciones de bajo voltaje.
- El portador DRV8880 ofrece limitación de corriente dinámicamente escalable y «ajuste automático», que selecciona automáticamente el modo de decaimiento de cada ciclo PWM para un rendimiento de regulación de corriente óptimo en función de factores como la resistencia al bobinado y la inductancia del motor y la velocidad y carga dinámicas del motor.
También vendemos una versión más grande de la portadora A4988 que tiene protección de alimentación inversa en la entrada de alimentación principal y reguladores de voltaje de 5 V y 3,3 V incorporados que eliminan la necesidad de suministros lógicos y de motor separados.
Algunos motores paso a paso unipolares (por ejemplo, aquellos con seis u ocho cables) pueden ser controlados por este controlador como motores paso a paso bipolares. Para obtener más información, consulte las preguntas frecuentes. Los motores unipolares con cinco cables no se pueden usar con este controlador.
Hardware incluido
El portaequipajes de motor paso a paso A4988 viene con un cabezal macho separable de 1×16 pines de 0,1″. Los cabezales se pueden soldar para su uso con placas de pan sin soldadura o conectores hembra de 0,1″. También puede soldar sus cables de motor y otras conexiones directamente a la placa. (También está disponible una versión de esta placa con encabezados ya instalados.)
|
|
|
Utilizando el controlador
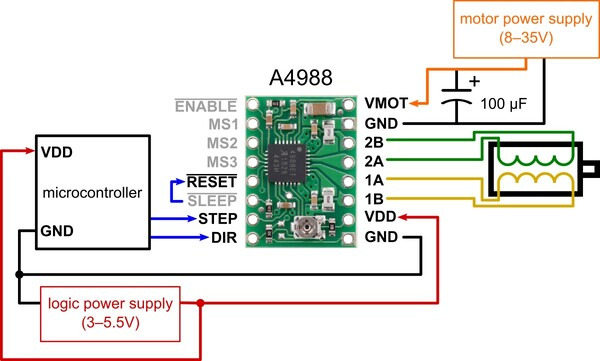
Mínimo diagrama de cableado para la conexión de un microcontrolador para una A4988 motor paso a paso de conductor transportista (modo full-step).
Conexiones de alimentación
El controlador requiere una tensión de alimentación lógica (3-5.5 V) para conectarse a través de los pines VDD y GND y una tensión de alimentación del motor (8-35 V) para conectarse a través de VMOT y GND. Estos suministros deben tener condensadores de desacoplamiento adecuados cerca de la placa, y deben ser capaces de entregar las corrientes esperadas (picos de hasta 4 A para el suministro del motor).
Advertencia: Esta placa portadora utiliza condensadores cerámicos de bajo ESR, lo que la hace susceptible a picos destructivos de voltaje LC, especialmente cuando se usan cables de alimentación de más de unas pocas pulgadas. En las condiciones adecuadas, estos picos pueden exceder el voltaje máximo nominal de 35 V para el A4988 y dañar permanentemente la placa, incluso cuando la tensión de alimentación del motor es tan baja como 12 V. Una forma de proteger al conductor de tales picos es colocar un condensador electrolítico grande (al menos 47 µF) a través de la potencia del motor (VMOT) y la tierra en algún lugar cerca de la placa.
Conexiones de motor
El A4988 puede accionar motores paso a paso de cuatro, seis y ocho hilos si están conectados correctamente; una respuesta de preguntas frecuentes explica en detalle los cables adecuados.
Advertencia: Conectar o desconectar un motor paso a paso mientras el conductor está encendido puede destruir al conductor. (De manera más general, volver a cablear cualquier cosa mientras está alimentada está causando problemas.)
Tamaño de paso (y micro paso)
Los motores paso a paso suelen tener una especificación de tamaño de paso (por ejemplo, 1,8° o 200 pasos por revolución), que se aplica a pasos completos. Un controlador de microstepping como el A4988 permite resoluciones más altas al permitir ubicaciones de pasos intermedios, que se logran al energizar las bobinas con niveles de corriente intermedios. Por ejemplo, conducir un motor en modo de cuarto de paso le dará al motor de 200 pasos por revolución 800 micro pasos por revolución mediante el uso de cuatro niveles de corriente diferentes.
Las entradas selectoras de resolución (tamaño de paso) (MS1, MS2 y MS3) permiten la selección de las resoluciones de cinco pasos de acuerdo con la tabla siguiente. MS1 y MS3 tienen resistencias pull-down internas de 100kΩ y MS2 tiene una resistencia pull-down interna de 50kΩ, por lo que dejar desconectados estos tres pines de selección de microstep da como resultado el modo de paso completo. Para que los modos de microstep funcionen correctamente, el límite de corriente debe estar lo suficientemente bajo (ver más abajo) para que el límite de corriente se active. De lo contrario, los niveles de corriente intermedios no se mantendrán correctamente, y el motor saltará microsteps.
| MS1 | MS2 | MS3 | Resolución del paso |
|---|---|---|---|
| Bajo | Bajo | Bajo | paso Completo |
| Alta | Bajo | Bajo | la Mitad de paso |
| Bajo | Alta | Bajo | Cuarto paso |
| Alta | Alta | Bajo | Octavo paso |
| Alta | Alta | Alta | Decimosexta paso |
el Control de entradas
Cada pulso para el PASO de entrada corresponde a un micro de la motor paso a paso en la dirección seleccionada por el pasador DIR. Tenga en cuenta que los pines STEP y DIR no se tiran internamente a ningún voltaje en particular, por lo que no debe dejar ninguno de estos pines flotando en su aplicación. Si solo desea rotación en una sola dirección, puede atar DIR directamente a VCC o GND. El chip tiene tres entradas diferentes para controlar sus muchos estados de potencia: RST, SLP y EN. Para obtener más información sobre estos estados de potencia, consulte la hoja de datos. Tenga en cuenta que el pin RST está flotante; si no está utilizando el pin, puede conectarlo al pin SLP adyacente en la PCB para elevarlo y habilitar la placa.
Limitación de corriente
Una forma de maximizar el rendimiento del motor paso a paso es utilizar un voltaje tan alto como sea práctico para su aplicación. En particular, el aumento del voltaje generalmente permite mayores velocidades de paso y par de paso, ya que la corriente puede cambiar más rápidamente en las bobinas después de cada paso. Sin embargo, para usar voltajes por encima del voltaje nominal de un motor paso a paso de forma segura, la corriente de la bobina debe limitarse activamente para evitar que exceda la corriente nominal del motor.
El A4988 admite tal limitación de corriente activa, y el potenciómetro de trimmer en la placa se puede usar para establecer el límite de corriente. Una forma de establecer el límite de corriente es poner el controlador en modo de paso completo y medir la corriente que corre a través de una sola bobina de motor mientras ajusta el potenciómetro de límite de corriente. Esto debe hacerse con el motor manteniendo una posición fija (p. ej. sin marcar la entrada ESCALONADA). Tenga en cuenta que la corriente que está midiendo es solo el 70% de la configuración del límite de corriente real, ya que ambas bobinas están siempre encendidas y limitadas a este valor en el modo de paso completo, por lo que si más tarde habilita los modos de microstepping, la corriente a través de las bobinas podrá superar esta corriente de paso completo medida en un 40% (1/0, 7) en ciertos pasos; tenga esto en cuenta al usar este método para establecer el límite de corriente. Además, tenga en cuenta que tendrá que realizar este ajuste de nuevo si alguna vez cambia el voltaje lógico, Vdd, ya que el voltaje de referencia que establece el límite de corriente es una función de Vdd.
Nota: La corriente de la bobina puede ser muy diferente de la corriente de la fuente de alimentación, por lo que no debe usar la corriente medida en la fuente de alimentación para establecer el límite de corriente. El lugar apropiado para colocar su medidor de corriente es en serie con una de sus bobinas de motor paso a paso.
Otra forma de establecer el límite de corriente es calcular el voltaje de referencia que corresponde al límite de corriente deseado y, a continuación, ajustar el potenciómetro de límite de corriente hasta que mida ese voltaje en el pin VREF. El voltaje del pin VREF es accesible a través de una vía que está rodeada en la serigrafía inferior de la placa de circuito. El límite de corriente, IMAX, se relaciona con el voltaje de referencia de la siguiente manera:
` «I_ (MAX) = (V_ (REF)) / (8 * R_ (CS))`
o, reorganizado para resolver para VREF:
» V_ (REF) = 8 * I_ (MAX) * R_ (CS) »
RCS es la resistencia de detección de corriente; las versiones originales de esta placa usaban resistencias de detección de corriente de 0,050 Ω, pero cambiamos a usar resistencias de detección de corriente de 0,068 Ω en enero de 2017, lo que hace más útil el rango del potenciómetro de ajuste. La siguiente imagen muestra cómo identificar qué resistencias de detección de corriente tiene su placa:
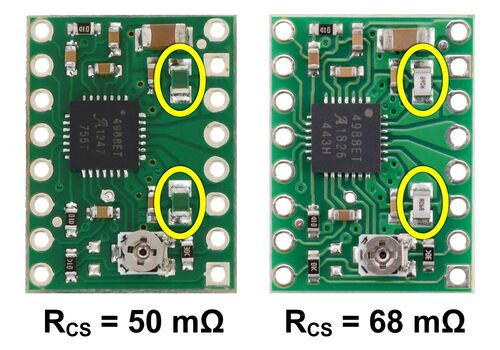
Identificación de resistencias de detección de 50 mΩ originales (izquierda) y resistencias de detección de 68 mΩ (derecha) introducidas en enero de 2017.
Así que, por ejemplo, si desea establecer el límite de corriente en 1 A y tiene una placa con resistencias de detección de 68 mΩ, establecería VREF en 540 mV. Al hacer esto, se asegura de que, aunque la corriente a través de cada bobina cambie de paso a paso, la magnitud del vector de corriente en el motor paso a paso se mantenga constante en 1 A:
`sqrt(I_(COIL1)^2 + I_(COIL2)^2) = I_(MAX) = 1 texto (A)`
Si, en cambio, desea que la corriente a través de cada bobina sea 1 A en el modo de paso completo, deberá establecer el límite de corriente para que sea un 40% mayor, o 1.4 A, ya que las bobinas están limitadas a aproximadamente el 70% del límite de corriente establecido en el modo de paso completo (la ecuación anterior muestra por qué este es el caso). Para hacer esto con una placa con resistencias de detección de 68 mΩ, debe configurar VREF a 770 mV.
Consideraciones de disipación de potencia
El CI del controlador A4988 tiene una capacidad de corriente máxima de 2 A por bobina, pero la corriente real que puede entregar depende de lo bien que pueda mantener el CI fresco. La placa de circuito impreso del portador está diseñada para extraer calor del CI, pero para suministrar más de aproximadamente 1 A por bobina, se requiere un disipador de calor u otro método de enfriamiento.
Este producto puede calentarse lo suficiente como para quemarlo mucho antes de que el chip se sobrecaliente. Tenga cuidado al manipular este producto y otros componentes conectados a él.
Tenga en cuenta que medir el consumo de corriente en la fuente de alimentación generalmente no proporcionará una medida precisa de la corriente de la bobina. Dado que el voltaje de entrada al controlador puede ser significativamente más alto que el voltaje de la bobina, la corriente medida en la fuente de alimentación puede ser bastante más baja que la corriente de la bobina (el controlador y la bobina básicamente actúan como una fuente de alimentación de conmutación descendente). Además, si la tensión de alimentación es muy alta en comparación con lo que el motor necesita para alcanzar la corriente establecida, el ciclo de trabajo será muy bajo, lo que también conduce a diferencias significativas entre las corrientes promedio y RMS.
Diagrama esquemático
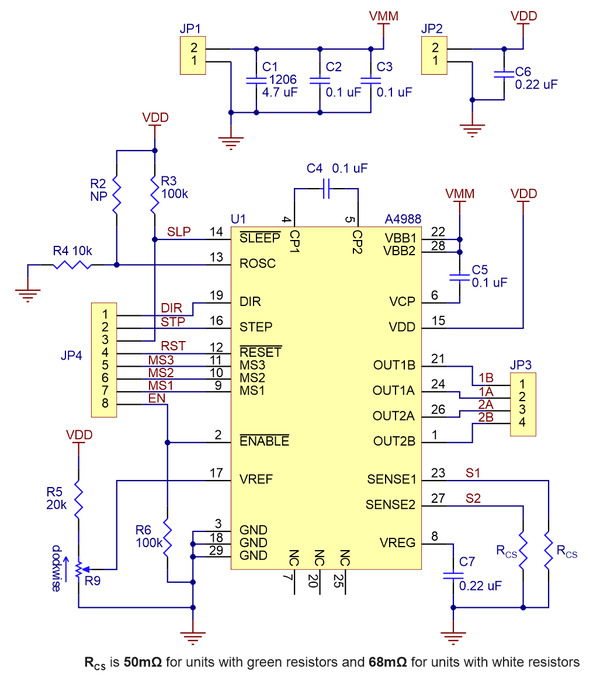
Diagrama esquemático del conductor del motor paso a paso A4988 (ediciones verde y negra).
Nota: Esta placa es un reemplazo inmediato para nuestro soporte de conductor de motor paso a paso A4983 original (y ahora descontinuado). El nuevo A4988 ofrece protección contra sobrecorriente y tiene un pin de selección de microstep de 100k interno extraíble en el MS1, pero por lo demás es prácticamente idéntico al A4983.