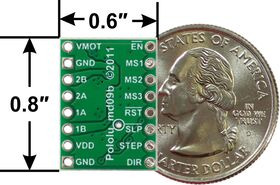
A4983/A4988 schrittmotor fahrer träger mit abmessungen.
Übersicht
Dieses produkt ist ein carrier board oder breakout board für Allegro der A4988 DMOS Mikroschritt Fahrer mit Übersetzer und Überstromschutz; wir daher empfehlen sorgfältige lesen der A4988 datenblatt (1 MB pdf) vor der verwendung dieses produkt. Mit diesem Schrittmotortreiber können Sie einen bipolaren Schrittmotor mit bis zu 2 A Ausgangsstrom pro Spule steuern (weitere Informationen finden Sie im Abschnitt Überlegungen zur Verlustleistung unten). Hier sind einige der wichtigsten Funktionen des Fahrers:
- Einfache Schritt- und Richtungssteuerungsschnittstelle
- Fünf verschiedene Schrittauflösungen: voll-schritt, halb-schritt, viertel-schritt, achte-schritt, und sechzehnten-schritt
- Einstellbare strom control können sie die maximale strom ausgang mit einem potentiometer, die können sie verwenden spannungen über ihre stepper motor der nennspannung zu erreichen höhere schritt raten
- Intelligente hacken control, dass wählt automatisch die richtige strom zerfall modus (schnelle zerfall oder langsam zerfall)
- Über-temperatur thermische abschaltung, unter-spannung lockout, und crossover-strom schutz
- Kurze-zu-boden und kurzgeschlossen-last schutz
Dieses produkt wird mit allen komponenten-einschließlich die A4988 fahrer IC-installiert wie gezeigt in die produkt bild.
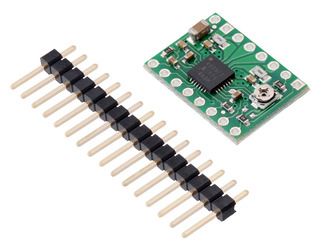
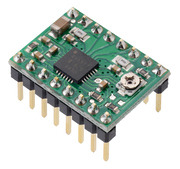
Dieses produkt schiffe einzeln verpackt mit 0,1 „männlichen header pins enthalten aber nicht gelötet in; wir führen auch eine version mit männlichen header pins bereits gelötet in. Für Kunden, die an höheren Stückzahlen zu niedrigeren Stückkosten interessiert sind, bieten wir eine lose verpackte Version ohne Kopfstifte und eine lose verpackte Version mit installierten Kopfstiften an.
Hinweis, dass wir tragen mehrere schrittmotor treiber, dass kann verwendet werden als alternativen für dieses modul (und drop-in ersatz in viele anwendungen):
- Die Black Edition A4988 schrittmotortreiber träger ist mit etwa 20% bessere leistung; außer für thermische eigenschaften, die Black Edition und diese (grün) bord sind austauschbar.
- Der MP6500-Träger kann ohne Kühlkörper bis zu 1,5 A pro Phase (kontinuierlich) liefern und ist in zwei Versionen erhältlich, eine mit einem Topf zur Steuerung der Strombegrenzung und eine mit digitaler Strombegrenzungssteuerung zur dynamischen Strombegrenzungseinstellung durch einen Mikrocontroller.
- Der DRV8825 Carrier bietet eine um etwa 50% bessere Leistung über einen größeren Spannungsbereich und verfügt über einige zusätzliche Funktionen.
- Der DRV8834-Träger arbeitet mit Motorversorgungsspannungen von bis zu 2,5 V und eignet sich daher für Niederspannungsanwendungen.
- Der DRV8880 Carrier bietet eine dynamisch skalierbare Strombegrenzung und „AutoTune“, die automatisch den Abklingmodus in jedem PWM-Zyklus für eine optimale Stromregelleistung basierend auf Faktoren wie dem Widerstand und der Induktivität der Motorwicklung sowie der dynamischen Drehzahl und Last des Motors auswählt.
Wir verkaufen auch eine größere Version des A4988-Trägers mit Verpolungsschutz am Hauptstromeingang und integrierten 5-V- und 3,3-V-Spannungsreglern, die separate Logik- und Motorversorgungen überflüssig machen.
Einige unipolare Schrittmotoren (z. B. solche mit sechs oder acht Leitungen) können von diesem Treiber als bipolare Schrittmotoren gesteuert werden. Weitere Informationen finden Sie in den häufig gestellten Fragen. Unipolare Motoren mit fünf Leitungen können mit diesem Treiber nicht verwendet werden.
Enthalten hardware
Die A4988 schrittmotor fahrer träger kommt mit einem 1 × 16-pin abtrünnigen 0,1 „männlichen header. Die Header können für die Verwendung mit lötfreien Steckbrettern oder 0,1 “ -Buchsen eingelötet werden. Sie können Ihre Motorleitungen und andere Anschlüsse auch direkt an die Platine löten. (Eine Version dieses Boards mit bereits installierten Headern ist ebenfalls verfügbar.)
|
|
|
Verwendung des Treibers
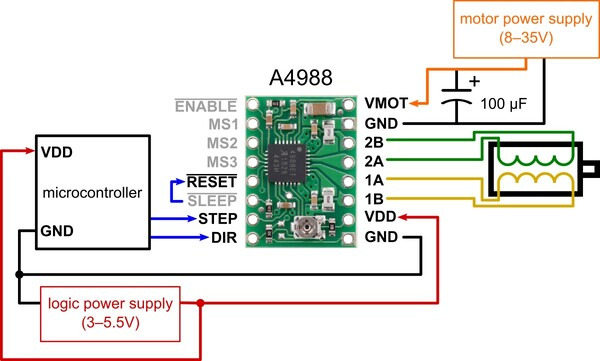
Minimaler Schaltplan zum Anschließen eines Mikrocontrollers an einen A4988-Schrittmotortreiberträger (Vollschrittmodus).
Stromanschlüsse
Der Treiber benötigt eine logische Versorgungsspannung (3 – 5.5 V) über die VDD– und GND-Pins und eine Motorversorgungsspannung (8 – 35 V) über VMOT und GND angeschlossen werden. Diese Netzteile sollten über geeignete Entkopplungskondensatoren in der Nähe der Platine verfügen und in der Lage sein, die erwarteten Ströme zu liefern (Spitzenwerte bis zu 4 A für die Motorversorgung).Warnung: Diese Trägerplatine verwendet Keramikkondensatoren mit niedrigem ESR-Wert, wodurch sie anfällig für zerstörerische LC-Spannungsspitzen ist, insbesondere wenn Stromkabel verwendet werden, die länger als einige Zoll sind. Unter den richtigen Bedingungen können diese Spitzen die maximale Nennspannung von 35 V für den A4988 überschreiten und die Platine dauerhaft beschädigen, selbst wenn die Motorversorgungsspannung nur 12 V beträgt. Eine Möglichkeit, den Treiber vor solchen Spitzen zu schützen, besteht darin, einen großen (mindestens 47 µF) Elektrolytkondensator über die Motorleistung (VMOT) zu legen und irgendwo in der Nähe der Platine zu erden.
Motoranschlüsse
Vier-, Sechs- und Achtdraht-Schrittmotoren können vom A4988 angetrieben werden, wenn sie richtig angeschlossen sind.
Warnung: Das Anschließen oder Trennen eines Schrittmotors, während der Treiber mit Strom versorgt wird, kann den Treiber zerstören. (Allgemeiner gesagt, das Neuverkabeln von etwas, während es mit Strom versorgt wird, führt zu Problemen.)
Schritt- (und Mikroschritt-) Größe
Schrittmotoren haben typischerweise eine Schrittgrößenspezifikation (z. B. 1,8 ° oder 200 Schritte pro Umdrehung), die für volle Schritte gilt. Ein Mikroschritttreiber wie der A4988 ermöglicht höhere Auflösungen, indem Zwischenschrittstellen zugelassen werden, die durch Bestromen der Spulen mit Zwischenstrompegeln erreicht werden. Wenn Sie beispielsweise einen Motor im Viertelschrittmodus antreiben, erhält der Motor mit 200 Schritten pro Umdrehung 800 Mikroschritte pro Umdrehung, indem Sie vier verschiedene Stromniveaus verwenden.
Die Auswahleingänge für die Auflösung (Schrittweite) (MS1, MS2 und MS3) ermöglichen die Auswahl aus den fünf Schrittauflösungen gemäß der folgenden Tabelle. MS1 und MS3 haben interne 100kΩ pull-down widerstände und MS2 hat eine interne 50kΩ pull-down widerstand, so verlassen diese drei microstep auswahl pins getrennt ergebnisse in volle-schritt modus. Damit die Microstep-Modi korrekt funktionieren, muss die Strombegrenzung niedrig genug eingestellt sein (siehe unten), damit die Strombegrenzung aktiviert wird. Andernfalls werden die Zwischenstrompegel nicht korrekt eingehalten und der Motor überspringt Mikroschritte.
| MS1 | MS2 | MS3 | Mikroschritt-Auflösung |
|---|---|---|---|
| Niedrig | Niedrig | Niedrig | Vollschritt |
| Hoch | Niedrig | Niedrig | Halber Schritt |
| Niedrig | Hoch | Niedrig | Viertelschritt |
| Hoch | Hoch | Niedrig | Achter Schritt |
| Hoch | Hoch | Hoch | Sechzehnter Schritt |
Steuereingänge
Jeder Impuls zum Schritteingang entspricht einem Mikroschritt des schrittmotor in die richtung ausgewählt durch die DIR pin. Beachten Sie, dass die STEP- und DIR-Pins intern nicht auf eine bestimmte Spannung gezogen werden, sodass Sie keinen dieser Pins in Ihrer Anwendung schweben lassen sollten. Wenn Sie nur eine Drehung in eine Richtung wünschen, können Sie DIR direkt an VCC oder GND binden. Der Chip verfügt über drei verschiedene Eingänge zur Steuerung seiner vielen Leistungszustände: RST, SLP und EN. Einzelheiten zu diesen Leistungszuständen finden Sie im Datenblatt. Bitte beachten sie, dass die RST pin ist schwimm; wenn Sie den Pin nicht verwenden, können Sie ihn mit dem benachbarten SLP-Pin auf der Leiterplatte verbinden, um ihn hoch zu bringen und die Platine zu aktivieren.
Strombegrenzung
Eine Möglichkeit, die Leistung des Schrittmotors zu maximieren, besteht darin, eine so hohe Spannung zu verwenden, wie es für Ihre Anwendung praktisch ist. Insbesondere ermöglicht die Erhöhung der Spannung im Allgemeinen höhere Schrittraten und ein höheres Schrittmoment, da sich der Strom in den Spulen nach jedem Schritt schneller ändern kann. Um jedoch Spannungen über der Nennspannung eines Schrittmotors sicher verwenden zu können, muss der Spulenstrom aktiv begrenzt werden, damit er den Nennstrom des Motors nicht überschreitet.
Der A4988 unterstützt eine solche aktive Strombegrenzung, und das Trimmpotentiometer auf der Platine kann zum Einstellen der Strombegrenzung verwendet werden. Eine Möglichkeit, die Strombegrenzung einzustellen, besteht darin, den Treiber in den Vollschrittmodus zu versetzen und den Strom zu messen, der durch eine einzelne Motorspule fließt, während das Strombegrenzungspotentiometer eingestellt wird. Dies sollte erfolgen, wenn der Motor eine feste Position einnimmt (d. h. b. ohne Taktung des STEP-Eingangs). Beachten Sie, dass der Strom, den Sie messen, nur 70% der tatsächlichen Strombegrenzungseinstellung beträgt, da beide Spulen im Vollschrittmodus immer eingeschaltet und auf diesen Wert begrenzt sind. Wenn Sie also später Mikroschrittmodi aktivieren, kann der Strom durch die Spulen diesen gemessenen Vollschrittstrom in bestimmten Schritten um 40% (1 / 0,7) überschreiten; Bitte berücksichtigen Sie dies, wenn Sie diese Methode zum Einstellen der Strombegrenzung verwenden. Beachten Sie auch, dass Sie diese Einstellung erneut durchführen müssen, wenn Sie jemals die logische Spannung Vdd ändern, da die Referenzspannung, die die Strombegrenzung festlegt, eine Funktion von Vdd ist.
Hinweis: Der Spulenstrom kann sich stark vom Stromversorgungsstrom unterscheiden, daher sollten Sie den an der Stromversorgung gemessenen Strom nicht zum Einstellen der Strombegrenzung verwenden. Der geeignete Ort, um Ihren Strommesser zu platzieren, ist in Reihe mit einer Ihrer Schrittmotorspulen.
Eine andere Möglichkeit, die Strombegrenzung einzustellen, besteht darin, die Referenzspannung zu berechnen, die der gewünschten Strombegrenzung entspricht, und dann das Strombegrenzungspotentiometer einzustellen, bis Sie diese Spannung am VREF-Pin messen. Die VREF-Pin-Spannung ist über eine Via zugänglich, die auf dem unteren Siebdruck der Leiterplatte eingekreist ist. Die Strombegrenzung IMAX bezieht sich auf die Referenzspannung wie folgt:
`I_(MAX) = (V_(REF)) / (8 * R_(CS)`“
oder, neu angeordnet, um nach VREF zu lösen:
`V_(REF) = 8 * I_(MAX) * R_(CS`“
RCS ist der Strommesswiderstand; original versionen von dieses board verwendet 0,050 Ω current sense widerstände, aber wir switched zu mit 0,068 Ω current sense widerstände in Januar 2017, die macht mehr der einstellung potentiometer der palette nützlich. Das folgende Bild zeigt, wie Sie die Strommesswiderstände Ihres Boards identifizieren können:
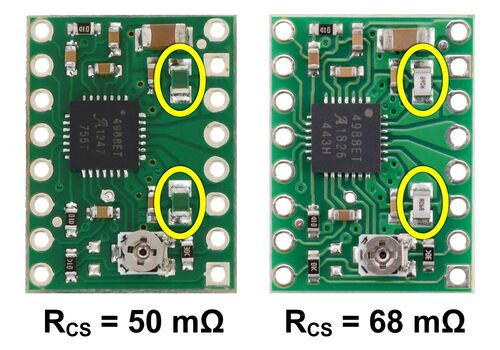
Identifizierung der ursprünglichen 50-mΩ-Messwiderstände (links) und 68-mΩ-Messwiderstände (rechts), die im Januar 2017 eingeführt wurden.
Wenn Sie beispielsweise die Strombegrenzung auf 1 A einstellen möchten und eine Platine mit 68 mΩ-Messwiderständen haben, würden Sie VREF auf 540 mV einstellen. Dadurch wird sichergestellt, dass, obwohl sich der Strom durch jede Spule von Schritt zu Schritt ändert, die Größe des Stromvektors im Schrittmotor konstant bei 1 A bleibt:
`sqrt(I_(COIL1)^2 + I_(COIL2)^2) = I_(MAX) = 1 Text (A)`
Wenn Sie stattdessen möchten, dass der Strom durch jede Spule im Vollschrittmodus 1 A beträgt, müssen Sie die Strombegrenzung auf 40% höher oder 1 einstellen.4A, da die Spulen im Vollschrittbetrieb auf etwa 70% der eingestellten Strombegrenzung begrenzt sind (die obige Gleichung zeigt, warum dies der Fall ist). Um dies mit einer Platine mit 68 mΩ Messwiderständen zu tun, würden Sie VREF auf 770 mV einstellen.
Überlegungen zur Verlustleistung
Der A4988-Treiber-IC hat eine maximale Stromstärke von 2 A pro Spule, aber der tatsächliche Strom, den Sie liefern können, hängt davon ab, wie gut Sie den IC kühl halten können. Die Leiterplatte des Trägers ist so ausgelegt, dass sie Wärme aus dem IC zieht, aber um mehr als ungefähr 1 A pro Spule zu liefern, ist ein Kühlkörper oder eine andere Kühlmethode erforderlich.
Dieses Produkt kann heiß genug werden, um Sie zu verbrennen, lange bevor der Chip überhitzt. Seien Sie vorsichtig beim Umgang mit diesem Produkt und anderen damit verbundenen Komponenten.
Bitte beachten Sie, dass die Messung der Stromaufnahme an der Stromversorgung im Allgemeinen kein genaues Maß für den Spulenstrom liefert. Da die Eingangsspannung zum Treiber deutlich höher als die Spulenspannung sein kann, kann der gemessene Strom an der Stromversorgung ziemlich viel niedriger sein als der Spulenstrom (der Treiber und die Spule wirken im Grunde wie ein schaltendes Abwärtsnetzteil). Wenn die Versorgungsspannung im Vergleich zu dem, was der Motor zum Erreichen des eingestellten Stroms benötigt, sehr hoch ist, ist das Tastverhältnis sehr niedrig, was ebenfalls zu signifikanten Unterschieden zwischen durchschnittlichem und effektivem Strom führt.
Schematische darstellung
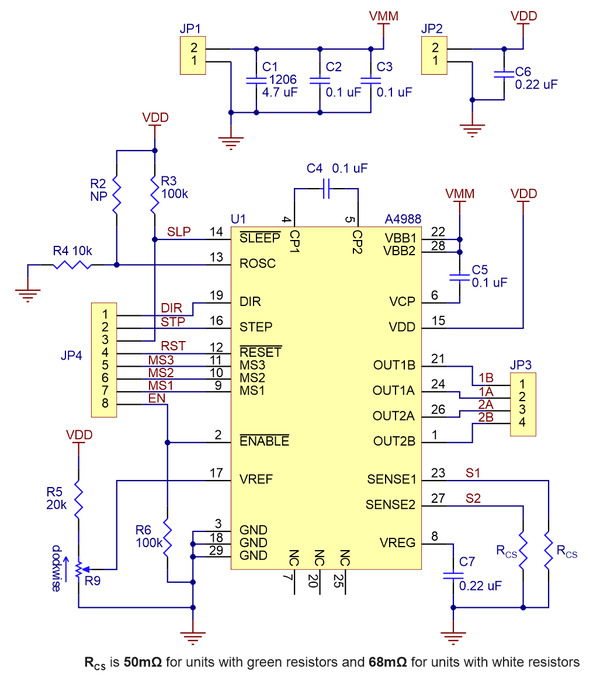
Schematische darstellung der A4988 schrittmotor fahrer träger (sowohl grün und schwarz ausgaben).
Hinweis: Dieses board ist ein drop-in ersatz für unsere original (und jetzt eingestellt) A4983 schrittmotor fahrer träger. Der neuere A4988 bietet Überstromschutz und verfügt über einen internen 100k-Pull-Down am MS1-Mikroschritt-Auswahlstift, ist ansonsten jedoch praktisch identisch mit dem A4983.