förändringshastigheter
linjära funktioner gäller för verkliga världsproblem som involverar en konstant hastighet.
inlärningsmål
använd linjära ekvationer för att lösa problem om förändringshastigheter
viktiga Takeaways
nyckelpunkter
- Om du vet att ett verkligt problem är linjärt, till exempel Avståndet du reser när du går för en joggingtur, kan du rita funktionen och göra några antaganden med bara två punkter.
- en funktions lutning är densamma som förändringshastigheten för den beroende variabeln (y). Till exempel, om du grafer avstånd vs. tid, då lutningen är hur snabbt ditt avstånd förändras med tiden, eller med andra ord, din hastighet.
nyckeltermer
- förändringshastighet: förhållandet mellan två relaterade kvantiteter som förändras.
- linjär ekvation: en polynomekvation av den första graden (såsom x=2y-7).
- lutning: förhållandet mellan de vertikala och horisontella avstånden mellan två punkter på en linje; noll om linjen är horisontell, odefinierad om den är vertikal.
förändringshastighet
linjära ekvationer inkluderar ofta en förändringshastighet. Till exempel kallas hastigheten vid vilken avståndet ändras över tiden hastighet. Om två punkter i tid och det totala avståndet är känt kan förändringshastigheten, även känd som lutning, bestämmas. Från denna information kan en linjär ekvation skrivas och sedan kan förutsägelser göras från linjens ekvation.
Om enheten eller kvantiteten för vilken något ändras inte anges är vanligtvis hastigheten per tidsenhet. Den vanligaste typen av hastighet är” per tidsenhet”, såsom hastighet, hjärtfrekvens och flöde. Förhållanden som har en icke-tids nämnare inkluderar växelkurser, läskunnighet och elektriskt fält (i volt/meter).
När man beskriver enheterna i en hastighet används ordet ” per ”för att separera enheterna i de två mätningarna som används för att beräkna hastigheten (till exempel uttrycks en hjärtfrekvens”slag per minut”).
förändringshastighet: Real World Application
en idrottsman börjar han normal träning för nästa maraton under kvällen. Klockan 6: 00 börjar han springa och lämnar sitt hem. Klockan 7: 30 avslutar idrottaren körningen hemma och har kört totalt 7,5 miles. Hur snabb var hans genomsnittliga hastighet under loppet?
förändringshastigheten är hastigheten på hans körning; avstånd över tiden. Därför är de två variablerna tid (x) och avstånd (y). Den första punkten är i hans hus, där hans klocka läste 6:00 pm. Detta är början tid så låt oss ställa in den till 0. Så vår första punkt är (0,0) eftersom han inte sprang någonstans än. Låt oss tänka på vår tid i timmar. Vår andra punkt är 1,5 timmar senare, och vi sprang 7,5 miles. Den andra punkten är (1.5, 7.5). Vår hastighet (förändringshastighet) är helt enkelt lutningen på linjen som förbinder de två punkterna. Lutningen, som ges av: m = \frac{y_{2} – y_{1}}{x_{2} – x_{1}} blir m = \frac{7.5}{1.5}=5 miles per timme.
exempel: Graf linjen som illustrerar hastighet
för att grafera denna linje behöver vi y-avlyssningen och lutningen för att skriva ekvationen. Lutningen var 5 miles per timme och eftersom Utgångspunkten var vid (0,0) är y-avlyssningen 0. Så vår slutliga funktion är y=5x.
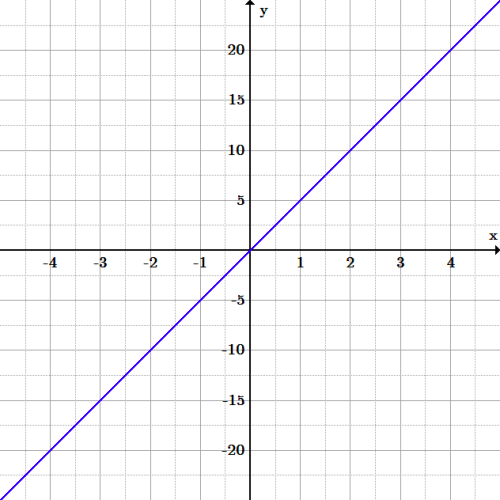
avstånd och tid graf: grafen för y=5x. de två variablerna är tid (x) och avstånd (y). Hastigheten löparen kör är 5 miles per timme. Med hjälp av grafen kan förutsägelser göras förutsatt att hans medelhastighet förblir densamma.
Med denna nya funktion kan vi nu svara på några fler frågor.
- hur många mil körde han efter den första halvtimmen? Använd ekvationen, om x=\frac{1}{2}, lösa för y. Om y=5x, då y=5(0,5)=2,5 miles.
- Om han fortsatte att springa i samma takt i totalt 3 timmar, hur många mil kommer han att ha kört? Om x=3, lösa för y. Om y=5x, då y=5(3)=15 miles.
det finns många sådana applikationer för linjära ekvationer. Allt som innebär en konstant förändringshastighet kan snyggt representeras med en linje med lutningen. Faktum är att så länge du bara har två punkter, om du vet att funktionen är linjär kan du rita den och börja ställa frågor! Se bara till att det du frågar och grafer är vettigt. Till exempel, i maratonexemplet är domänen egentligen bara x \ geq0, eftersom det inte är meningsfullt att gå in i negativ tid och förlora miles!
linjära matematiska modeller
linjära matematiska modeller beskriver verkliga applikationer med linjer.
lärandemål
applicera linjära matematiska modeller på verkliga problem
viktiga Takeaways
nyckelpunkter
- en matematisk modell beskriver ett system som använder matematiska begrepp och språk.
- linjära matematiska modeller kan beskrivas med linjer. Till exempel, en bil som går 50 mph, har rest ett avstånd representerat av y=50x, där x är tid i timmar och y är miles. Ekvationen och grafen kan användas för att göra förutsägelser.
- verkliga applikationer kan också modelleras med flera linjer, till exempel om två tåg reser mot varandra. Den punkt där de två linjerna skär är den punkt där tågen möts.
nyckeltermer
- matematisk modell: en abstrakt matematisk representation av en process, enhet eller koncept; den använder ett antal variabler för att representera ingångar, utgångar, interna tillstånd och uppsättningar ekvationer och ojämlikheter för att beskriva deras interaktion.
- linjär regression: Ett tillvägagångssätt för modellering av det linjära förhållandet mellan en beroende variabel y och en oberoende variabel x.
matematiska modeller
en matematisk modell är en beskrivning av ett system som använder matematiska begrepp och språk. Matematiska modeller används inte bara inom naturvetenskap och teknik discipliner, men också inom samhällsvetenskap. Linjär modellering kan inkludera Befolkningsförändring, telefonsamtal avgifter, kostnaden för att hyra en cykel, vikthantering, eller fundraising. En linjär modell inkluderar förändringshastigheten (m) och den ursprungliga mängden, y-avlyssningen b. Efter att modellen är skriven och en graf över linjen är gjord kan endera användas för att göra förutsägelser om beteenden.
Real Life Linear Model
många vardagliga aktiviteter kräver användning av matematiska modeller, kanske omedvetet. En svårighet med matematiska modeller ligger i att översätta den verkliga världsapplikationen till en exakt matematisk representation.
exempel: hyra en flyttbil
ett uthyrningsföretag tar ut en fast avgift på $30 och ytterligare $0,25 per mil för att hyra en flyttbil. Skriv en linjär ekvation för att approximera kostnaden y (i Dollar) i termer av x, antalet körda mil. Hur mycket skulle en 75 mil resa kosta?
använda lutningsavlyssningsformen för en linjär ekvation, med den totala kostnaden märkt y (beroende variabel) och milen märkt x (oberoende variabel):
\displaystyle y=mx+b
den totala kostnaden är lika med hastigheten per mil gånger antalet körda miles plus kostnaden för den fasta avgiften:
\displaystyle y=0,25 x+30
för att beräkna kostnaden för en 75 mil resa, ersätt 75 för X i ekvationen:
\displaystyle \begin{justera} y& = 0,25 x + 30\ \ &&&=48.75 \end{align}
verkliga livet modell med flera ekvationer
det är också möjligt att modellera flera rader och deras ekvationer.
exempel
ursprungligen är tåg a och B 325 mil från varandra. Tåg a reser mot B vid 50 miles per timme och Tåg B reser mot A vid 80 miles per timme. Vid vilken tidpunkt möts de två tågen? Vid den här tiden hur långt reste tågen?
börja först med tågens startpositioner, (y-intercepts, b). Tåg a startar är ursprunget, (0,0). Eftersom Tåg B är 325 miles från tåg a initialt är dess position (0,325).
För det andra, för att skriva ekvationerna som representerar varje tågs totala avstånd i termer av tid, beräkna förändringshastigheten för varje tåg. Eftersom tåg a färdas mot Tåg B, som har ett större y-värde, måste tåg A: S förändringshastighet vara positiv och lika med dess hastighet på 50. Tåg B reser mot A, som har ett mindre y-värde, vilket ger B en negativ förändringshastighet: -80.
de två linjerna är således:
\displaystyle y_A=50x\\
och:
\displaystyle y_B=−80x+325
de två tågen möts där de två linjerna skär varandra. För att hitta var de två linjerna skär varandra ställer ekvationerna lika med varandra och löser för x:
\displaystyle y_{a}=y_{B}
\displaystyle 50x=-80x+325
lösa för x ger:
\displaystyle x=2.5
de två tågen möts efter 2.5 timmar. För att hitta var detta är, Anslut 2.5 till endera ekvationen.
att ansluta den till den första ekvationen ger oss 50(2.5)=125, vilket innebär att den möts efter en resa 125 miles.
här är den grafiska modellen avstånd mot tid för de två tågen:

tåg: tåg A (röd linje) representeras av ekvationen: y=50x, och Tåg B (blå linje) representeras av ekvationen: y=-80x+325. De två tågen möts vid korsningspunkten (2.5,125), som är efter 125 miles på 2.5 timmar.
montering av en kurva
kurvanpassning med en linje försöker rita en linje så att den ”bäst passar” alla data.
inlärningsmål
använd regressionsformeln med minst kvadrater för att beräkna den linje som passar bäst för en uppsättning punkter
Key Takeaways
Key Points
- Curve fitting är användbart för att hitta en kurva som bäst passar data. Detta möjliggör antaganden om hur data grovt sprids ut och förutsägelser om framtida datapunkter.
- linjär regression försöker rita en linje som bäst passar data.
- approximation av vanliga minsta kvadrater är en typ av linjär regression som minimerar summan av kvadraterna för skillnaden mellan det approximerade värdet (från linjen) och det faktiska värdet.
- lutningen på linjen som approximerar n datapunkter ges av m=\frac{\sum_{i=1}^{n}x_{i}y_{i}-\frac{1}{n}\sum_{i=1}^{n}x_{i}\sum_{j=1}^{n}y_{j}}{\sum_{i=1}^{n}(x_{i}^{2})-\frac{1}{n}(\sum_{i=1}^{n}x_{i})^{2}}.
- y-avlyssningen av linjen som approximerar n-datapunkter ges av: b= \displaystyle{\frac{1}{n} \sum_{i=1}^{n} y_{1} – m \frac{1}{n} \sum_{i=1}^{n} x_{i} = \vänster (\bar{y} – m \bar{x} \höger)}
nyckeltermer
- kurvanpassning: processen att konstruera en kurva, eller en matematisk funktion, som har den bästa passa till en serie datapunkter, eventuellt föremål för begränsningar.
- outlier: ett värde i ett statistiskt prov som inte passar ett mönster eller beskriver de flesta andra datapunkter.
- minsta kvadrat approximation: ett försök att minimera summan av det kvadrerade avståndet mellan den förutsagda punkten och den faktiska punkten.
- linjär regression: ett tillvägagångssätt för att modellera det linjära förhållandet mellan en beroende variabel, y och en oberoende variabel, x.
kurvanpassning
kurvanpassning är processen att konstruera en kurva eller matematisk funktion som bäst passar till en serie datapunkter, eventuellt föremål för begränsningar. Kurvpassning kan innebära antingen interpolering, där en exakt passform till data krävs, eller utjämning, där en ”slät” funktion är konstruerad som ungefär passar data. Monterade kurvor kan användas som ett hjälpmedel för datavisualisering, för att härleda värden för en funktion där inga data finns tillgängliga och för att sammanfatta relationerna mellan två eller flera variabler. Extrapolering avser användningen av en monterad kurva utanför intervallet för de observerade data, och är föremål för en större grad av osäkerhet eftersom det kan återspegla den metod som används för att konstruera kurvan så mycket som den återspeglar de observerade data.
i det här avsnittet kommer vi bara att passa linjer till datapunkter, men det bör noteras att man kan passa polynomfunktioner, cirklar, bitvisa funktioner och valfritt antal funktioner till data och det är ett starkt använt ämne i statistiken.
linjär Regressionsformel
linjär regression är ett tillvägagångssätt för att modellera det linjära förhållandet mellan en beroende variabel, y och en oberoende variabel, x. med linjär regression, en linje i lutningsavlyssningsform, y=mx+b hittas som ”bäst passar” data.
den enklaste och kanske vanligaste linjära regressionsmodellen är den vanliga minsta kvadrat approximationen. Denna approximation försöker minimera summan av det kvadrerade avståndet mellan linjen och varje punkt.
\displaystyle m=\frac{\sum_{i=1}^{n}x_{i}y_{i}-\frac{1}{n}\sum_{i=1}^{n}x_{i}\sum_{j=1}^{n}y_{j}}{\sum_{i=1}^{n}(x_{i}^{2})-\frac{1}{n}(\sum_{i=1}^{n}x_{i})^{2}}
för att hitta lutningen på linjen med bästa passform, beräkna i följande steg:
- summan av produkten av X-och y-koordinaterna \sum_{i=1}^{n}x_{i}y_{i}.
- summan av x-koordinaterna \ sum_{i=1}^{n}x_{i}.
- summan av Y-koordinaterna \ sum_{j=1}^{n}y_{j}.
- summan av kvadraterna för x-koordinaterna \sum_{i=1}^{n}(x_{i}^{2}).
- summan av x-koordinaterna kvadrat (\sum_{i=1}^{n}x_{i})^{2}.
- kvoten för täljaren och nämnaren.
\displaystyle \begin{align} b&= \frac{1}{n} \sum_{i=1}^{n} y_{1} – m \frac{1}{n} \sum_{i=1}^{n} x_{i} \ \ &= \vänster (\bar{y} – m \bar{x} \right) \end{align}
för att hitta y-intercept (B), beräkna med följande steg:
- medelvärdet av Y-koordinaterna. Låt \ bar{y}, uttalad y-bar, representera medelvärdet (eller medelvärdet) y-värdet för alla datapunkter: \bar y =\frac{1}{n}\sum_{i=1}^{n} y_{i}.
- medelvärdet av x-koordinaterna. Respektive \ bar{x}, uttalad x-bar, är medelvärdet (eller medelvärdet) x för alla datapunkter: \bar x=\frac{1}{n}\sum_{i=1}^{n} x_{i}.
- ersätt värden i formeln ovan b= \ bar{y} – m \bar{x}.
med dessa värden på m och b har vi nu en rad som approximerar punkterna i diagrammet.
exempel: Skriv minsta kvadratpassningslinje och Graf sedan den linje som bäst passar data
För n = 8 poäng: (-1,0),(0,0),(1,1),(2,2),(3,1),(4,2.5),(5,3) och (6,4).
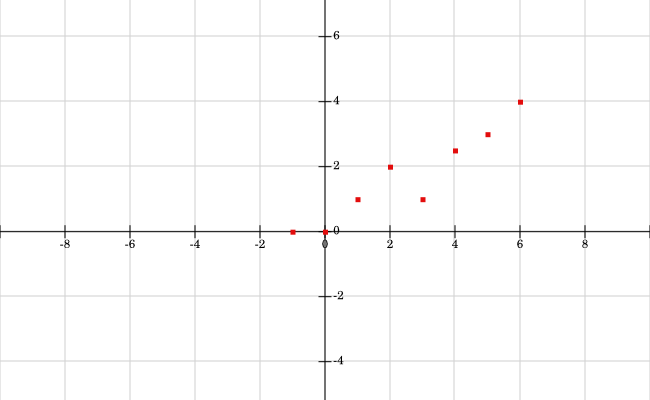
exempel punkter: punkterna är graferade i en scatterplot mode.
först, hitta lutningen (m) och y-intercept (b) som bäst approximerar dessa data, med hjälp av ekvationerna från föregående avsnitt:
för att hitta lutningen, beräkna:
- summan av produkten av X-och y-koordinaterna \sum_{i=1}^{n}x_{i}y_{i}.
- summan av x-koordinaterna \ sum_{i=1}^{n}x_{i}.
- summan av Y-koordinaterna \ sum_{i=1}^{n}y_{i}.
\displaystyle \begin{align} \sum_{i=1}^{n}x_{i}y_{i}&&=57 \end{align} \displaystyle \begin{align} \sum_{i=1}^{n}x_{i}&&=20 \end{align}\displaystyle \begin{align} \sum_{i=1}^{n}y_{i}&&=13.5 \ end{justera}
\ displaystyle m=\frac{\sum_{i=1}^{n}x_{i}y_{i}-\frac{1}{n}\sum_{i=1}^{n}x_{i}\sum_{j=1}^{n}y_{j}}{\sum_{i=1}^{n}(x_{i}^{2})-\frac{1}{n}(\sum_{i=1}^{n}x_{i})^{2}}
4. Beräkna täljaren: produkten av x
och y-koordinaterna
minus en åttondel produkten av summan av x-koordinaterna och summan av y-koordinaterna:
\displaystyle \sum_{i=1}^{n}x_{i}-\frac{1} {n}\sum_{i=1}^{n} x_{i}\sum_{j=1}^{n} y_{j}
täljaren i lutningsekvationen är:
\displaystyle 57-\frac{1}{8}(20)(13.5)=23.25
5. Beräkna nämnaren:
summan av kvadraterna för x-koordinaterna minus en åttondel summan av x-koordinaterna kvadrat:
\displaystyle \sum_{i=1}^{n}(x_{i}^{2})-\frac{1}{n}(\sum_{i=1}^{n}x_{i})^{2}
\displaystyle \begin{align} \sum_{i=1}^{n}(x_{i}^{2})&& =92 \end{align}
nämnaren är 92- \ frac{1}{8}(20)^{2}=92-50=42 och lutningen är kvoten för täljaren och nämnaren: \frac{23.25}{42}\approx0.554.
nu för y-avlyssningen, (b) en åttondel gånger genomsnittet för x-koordinaterna: \bar{x}=\frac{20}{8}=2.5 och en åttondel gånger genomsnittet av y-koordinaterna: \ bar{y}=\frac{13.5}{8}=1.6875.därför b= \ frac{1}{n} \ sum_{i=1}^{n} y_{1} – m \ frac{1}{n} \ sum_{i = 1}^{n} x_{i} \\:
\ displaystyle b \ approx1.6875-0.554(2.5)=0.3025.
vår slutliga ekvation är därför y=0,554 x+0,3025, och denna linje ritas tillsammans med punkterna.
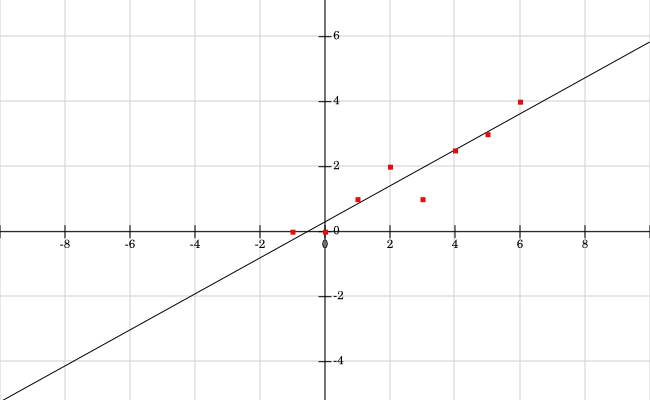
minsta rutor passar linje: Linjen hittades av minsta kvadrat approximation, y = 0,554 x + 0,3025. Lägg märke till 4 punkter är över linjen, och 4 punkter är under linjen.
Outliers och minst kvadratisk Regression
Om vi har en punkt som ligger långt ifrån den approximerande linjen, kommer den att skeva resultaten och göra linjen mycket värre. Låt oss till exempel säga i vårt ursprungliga exempel, istället för den punkt (-1,0) vi har (-1,6).
med samma beräkningar som ovan med den nya punkten är resultaten: m \ approx0.0536 och b\approx2.3035, för att få den nya ekvationen y=0.0536 x+2.3035.
om man tittar på punkterna och raden i den nya figuren nedan passar den här nya raden inte data bra på grund av outlier (-1,6). Att försöka passa linjära modeller till data som är kvadratisk, kubisk eller något icke-linjärt, eller data med många avvikare eller fel kan leda till dåliga approximationer.
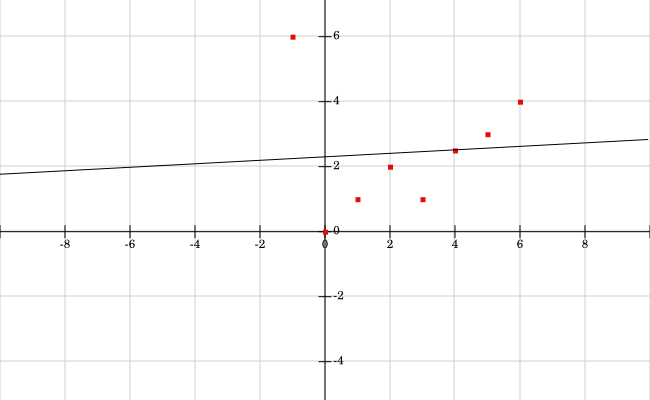
Outlier Approximated Line: här är den approximerade linjen med tanke på den nya outlier-punkten vid (-1, 6).