wprowadzenie
- jeśli jest to wielkość fizyczna, taka jak stres, to zwykle nazywa się ją tensorem.Jeśli nie jest to wielkość fizyczna, to zwykle nazywa się ją macierzą.
- zdecydowana większość tensorów inżynierskich jest symetryczna. Jedną z powszechnych liczb, która nie jest symetryczna i nie jest określana jako tensor, jest macierz rotacji.
- tensory są w rzeczywistości dowolną wielkością fizyczną, która może być reprezentowana przez Skalar, wektor lub macierz.Tensory zerowego rzędu, jak masa, nazywane są skalarami, podczas gdy tensory pierwszego rzędu nazywane są wektorami.Przykłady tensorów wyższego rzędu obejmują tensory naprężeń, odkształceń i sztywności.
- kolejność lub ranga macierzy lub tensora jest liczbą podzbiorów. Wektor jest tensorem pierwszego rzędu. Tensor naprężeń 3×3 to 2.stopień.
- transformacje współrzędnych tensorów są szczegółowo omówione tutaj.
macierz tożsamościowa
macierz tożsamościowa jest
\\]
mnożenie czegokolwiek przez macierz tożsamościową jest jak mnożenie przez jeden.
notacja Tensorowa
macierz tożsamościowa w notacji tensorowej jest po prostu \( \delta_{ij} \).Jest to Delta Kroneckera równa się 1 gdy \( i = j \) i 0 w przeciwnym razie.

to macierz czy nie?
notka od purystów… Macierz tożsamościowa jest macierzą, ale deltat Kroneckera nie. \ (\delta_{IJ} \) jest pojedynczą wartością skalarną, która wynosi 1 lub 0 w zależności od wartości \(i\) I \(j\). Dlatego też notacja tensorowa nie jest pogrubiona, ponieważ zawsze odnosi się do poszczególnych składowych tensorów, ale nigdy do tensora jako całości.
pod tym linkiem można przeprowadzić ciekawą dyskusję pomiędzy kimś, kto ją wykonuje, a kimś, kto tego nie robi.
Transpozycja
transpozycja macierzy odzwierciedla jej składowe o głównej przekątnej. Macierz transpozycyjna \({\bf a}\) jest zapisana \({\bf a}^{\!T}\).
TRANSPONUJ przykład
\,\qquad\text{then}\qquad{\bf a}^{\!T} = \ left\]
notacja Tensorowa
transpozycją \(a_{IJ}\) jest \(a_{j\,i}\).
wyznaczniki
wyznacznik macierzy jest zapisany jako det(\({\bf a}\)) lub \(|{\bf a}|\) i jest obliczany jako
\
Jeśli wyznacznik tensora lub macierzy jest zerowy, to nie ma odwrotności.
notacja Tensorowa
obliczenie wyznacznika można zapisać w notacji tensorowej na kilka różnych sposobów
\ wyznacznik iloczynu dwóch macierzy jest taki sam jak iloczyn wyznaczników dwóch macierzy. Innymi słowy,
\
wyznacznik gradientu deformacji daje stosunek objętości początkowej do końcowej elementu różniczkowego.
odwrotność
odwrotność macierzy \({\bf a}\) zapisuje się jako \({\bf a}^{\!
\
Jeśli \({\bf B}\) jest odwrotnością \({\bf a}\), to
\
notacja Tensorowa
odwrotność \(a_{ij}\) jest często zapisywana jako \(a^{-1}_{IJ}\).Zauważ, że prawdopodobnie nie jest to rygorystycznie poprawne, ponieważ, jak wspomniano wcześniej, ani \(a_{ij}\), ani \(A^{-1}_{ij}\) nie są technicznie same macierzami.Są tylko składnikami macierzy. No cóż…
odwrotność można obliczyć za pomocą
\
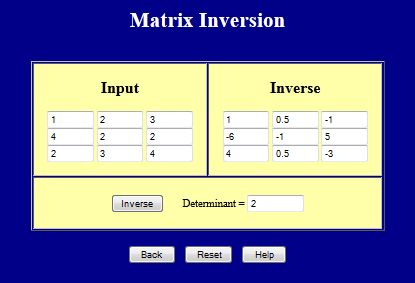
odwrotność macierzy
ta strona oblicza odwrotność macierzy 3×3.
Transpozycja odwrotności transpozycji…
odwrotność transponowanej macierzy równa się transponowanej odwrotności macierzy. Ponieważ kolejność nie ma znaczenia, operacja Podwójna jest skracana do \({\bf{a}}^{\!- T}\).
\
dodawanie macierzy
macierze i tensory są dodawane składowo po składowo tak jak wektory.Można to łatwo wyrazić w notacji tensorowej.
\
mnożenie macierzy (iloczyn Kropkowy)
iloczyn kropkowy dwóch macierzy mnoży każdy wiersz pierwszej przez każdą kolumnę drugiej. Produkty są często zapisywane z kropką w notacji macierzowej jako\ ({\bf a} \ cdot {\bf B}\), ale czasami zapisywane bez kropki jako \ ({\bf a} {\bf B}\). Mnożenie jest w rzeczywistości najlepiej wyjaśnione przez notację tensorową.
\
(zauważ, że w notacji tensorowej nie jest używana żadna kropka.) \(K\) w obu czynnikach automatycznie implikuje
\
, który jest i-tym wierszem pierwszej macierzy pomnożonym przez J-tą kolumnę tej drugiej macierzy. Jeśli na przykład chcesz obliczyć \(C_{23}\), to \(i = 2\) I \(j=3\) i
\
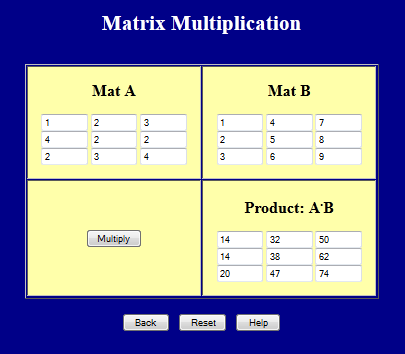
strona mnożenia macierzy
ta strona oblicza iloczyn punktowy dwóch macierzy 3×3.
mnożenie macierzy nie jest komutacyjne
bardzo ważne jest, aby uznać, że mnożenie macierzy nie jest komutacyjne, tj.
\
transpozycja i odwrotność produktów
transpozycja produktu równa się iloczynowi odwrotności w odwrotnej kolejności, a odwrotność produktu równa się iloczynowi odwrotności w odwrotnej kolejności.
zauważ, że „w odwrotnej kolejności” jest krytyczna.Jest to szeroko stosowane w sekcjach dotyczących gradientów deformacji i szczepów zielonych.
\
dotyczy to również wielu produktów. Na przykład
\
iloczyn z własną transpozycją
iloczyn macierzy i jej własnej transpozycji jest zawsze macierzą symetryczną.\({\bf A}^T \ cdot {\bf a}\) i \({\bf a} \cdot {\bf A}^T\)dają symetryczne, choć różne wyniki.Jest to szeroko stosowane w sekcjach dotyczących gradientów deformacji i szczepów zielonych.
iloczyn podwójnej kropki
iloczyn podwójnej kropki dwóch macierzy tworzy Skalar result.It jest zapisana w notacji macierzowej jako \({\bf a}: {\bf B}\).Chociaż rzadko stosowane poza mechaniką kontinuum, jest w rzeczywistości dość powszechne w zaawansowanych zastosowaniach sprężystości liniowej. Na przykład \ ({1 \ over 2} \ sigma: \ epsilon \) daje gęstość energii naprężenia w małej skali elastyczności liniowej.Po raz kolejny jego obliczenie najlepiej wyjaśnić notacją tensorową.
\
ponieważ indeksy \(i\) I \(j\) występują w obu czynnikach, oba są sumowane, dając
\