限界と無限小
微積分は、通常、非常に少量で作業することによって開発されます。 歴史的に、そうする最初の方法は無限小によるものでした。 これらは実数のように扱うことができますが、ある意味では「無限に小さい」オブジェクトです。 たとえば、無限小の数は0より大きいが、1、1/2、1/3、のシーケンス内の任意の数よりも小さい可能性があります。.. したがって、任意の正の実数よりも小さい。 この観点から、微積分は無限小を操作するための技術の集まりです。 記号d x{\displaystyle dx}

とd y{\displaystyle dy}

は無限小とみなされ、微分d y/d x{\displaystyle dy/dx}

単にそれらの比率でした。
無限小の概念を正確にすることが困難であったため、19世紀には無限小のアプローチが好まれなくなりました。 しかし、この概念は20世紀に非標準的な分析と滑らかな無限小分析の導入によって復活し、無限小の操作のための強固な基盤を提供しました。19世紀後半には、無限小は学界の中でイプシロン、デルタの限界へのアプローチに置き換えられました。 制限は、特定の入力での関数の値を、近くの入力での値の観点から記述します。 それらは、実数システムの文脈における小規模な行動を捉える。 この処理では、微積分は、特定の限界を操作するための技術のコレクションです。 無限小は非常に小さい数に置き換えられ、関数の無限小の動作は、より小さい数の制限動作をとることによって見出される。 限界は微積分学のためのより厳密な基礎を提供すると考えられ、この理由のためにそれらは二十世紀の間に標準的なアプローチになった。P>
微分計算

微分計算は、関数の導関数の定義、特性、および適用の研究です。 微分を見つけるプロセスは微分と呼ばれます。 定義域の機能そしてポイントが与えられて、そのポイントの微分はそのポイントの近くの機能の小さなスケールの行動を符号化する方法である。 定義域のすべての点で関数の導関数を見つけることによって、導関数または元の関数の導関数と呼ばれる新しい関数を生成することができます。 正式な用語では、導関数は、その入力として関数を取り、その出力として第二の関数を生成する線形演算子です。 これは、関数が通常数値を入力し、別の数値を出力する初等代数で研究されているプロセスの多くよりも抽象的です。 たとえば、倍増関数に入力3が与えられた場合は6が出力され、二乗関数に入力3が与えられた場合は9が出力されます。 しかし、導関数は二乗関数を入力として取ることができます。 これは、導関数が二乗関数のすべての情報(2が4に送信され、3が9に送信され、4が16に送信されるなど)を取り、この情報を使用して別の関数を生成す 二乗関数を導出することによって生成される関数は、倍増関数であることが判明した。より明確な用語では、「倍加関数」はg(x)=2xで表され、「二乗関数」はf(x)=x2で表されます。
より明確な用語では、「倍加関数」はg(x)=2xで表され、「二乗関数」はf(x)=x2 “導関数”は、式”x2″で定義される関数f(x)を入力として取り、それはすべての情報であり、二つは四つに送られ、三つは九つに送られ、四つは十六に送られるなど、この情報を使用して別の関数、関数g(x)=2xを出力する。
導関数の最も一般的な記号は、primeと呼ばれるアポストロフィのような記号です。 したがって、fと呼ばれる関数の導関数はf’で表され、”f prime”と発音されます。 例えば、f(x)=x2が二乗関数であれば、f′(x)=2xはその導関数(上からの倍加関数g)である。 この表記法はラグランジュの表記法として知られています。
関数の入力が時間を表す場合、導関数は時間に関する変化を表します。 たとえば、fが入力として時間を取り、その時点でのボールの位置を出力として与える関数である場合、fの導関数は、位置が時間的にどのように変化し
関数が線形の場合(つまり、関数のグラフが直線の場合)、関数はy=mx+bと書くことができます。xは独立変数、yは従属変数、bはy切片、
m=rise run=yの変化x=Δ y Δ x。 {\displaystyle m={\frac{\text{rise}}{\text{run}}}={\frac{{\text{change in}}y}{{\text{change in}}x}}={\frac{\Delta y}{\Delta x}}。 m=\frac{\text{上昇}}{\text{実行}}=\frac{\text{変化}y}{\text{変化}x}=\frac{\Delta y}{\Delta x}。
これは直線の傾きの正確な値を与えます。 しかし、関数のグラフが直線でない場合、yの変化をxの変化で割った値は変化します。 導関数は、入力の変化に関する出力の変化の概念に正確な意味を与えます。 具体的には、fを関数とし、fの定義域の点aを固定する。(a,f(a))は関数のグラフ上の点です。 したがって、(a+h,f(a+h))は(a,f(a))に近い値になります。 これら2点の間の傾きは
m=f(a+h)-f(a)(a+h)-a=f(a+h)-f(a)hです。 {\displaystyle m={\frac{f(a+h)-f(a)}{(a+h)-a}}={\frac{f(a+h)-f(a)}{h}}。 m=\frac{f(a+h)-f(a)}{(a+h)-a}=\frac{f(a+h)-f(a)}{h}です。
この式は差分商と呼ばれます。 曲線上の2点を通る線は割線と呼ばれるので、mは(a,f(a))と(a+h,f(a+h))の間の割線の傾きです。 割線は、aとa+hの間で何が起こるかを考慮していないため、点aでの関数の動作の近似に過ぎません。hをゼロに設定することで、aでの動作を発見す この導関数は、hがゼロになる傾向があるという極限を取ることによって定義され、hのすべての小さな値に対するfの振る舞いを考慮し、hがゼロに等しい場合の一貫した値を抽出することを意味する。
lim h→0f(a+h)−f(a)h。 {\displaystyle\lim_{h\to0}{f(a+h)-f(a)\over{h}}である。

ここでは、特定の例、入力3での二乗関数の導関数です。 F(x)=x2を二乗関数とする。ある点での曲線の導関数f'(x)は、その点での曲線に接する線の傾きです。f'(x)は、その点での曲線に接する線の傾きです。f'(x)は、その点での曲線の接線の傾きです。 この傾きは割線の傾きの限界値を考慮することによって決定される。 点(-3/2、-15/8)を通過する接線(緑色)は23/4の傾きを持ちます。f(x)=x3−xとすると、点(-3/2、-15/8)を通過する接線(緑色)は、点(-3/2、-15/8)を通過する接線(緑色)は、点(-3/2、-15/8) この画像の垂直方向と水平方向の縮尺は異なることに注意してください。
f ′ ( 3 ) = lim h → 0 ( 3 + h ) 2 − 3 2 h = lim h → 0 9 + 6 h + h 2 − 9 h = lim h → 0 6 h + h 2 h = lim h → 0 ( 6 + h ) = 6 {\displaystyle {\begin{aligned}f'(3)&=\lim _{h\to 0}{(3+h)^{2}-3^{2} \over {h}}\\&=\lim _{h\to 0}{9+6h+h^{2}-9 \over {h}}\\&=\lim _{h\to 0}{6h+h^{2} \over {h}}\\&=\lim _{h\to 0}(6+h)\\&=6\end{aligned}}}

ライプニッツ記法
ライプニッツによって導入された一般的な記法は、上記の例の導関数のために
y=x2d y d x=2xです。 {\displaystyle{\begin{align}y&=x^{2}\{\frac{dy}{dx}}&=2x.\end{align}}}
 d d x(x2)=2xです。 {\displaystyle{\frac{d}{dx}}(x^{2})=2x.}
d d x(x2)=2xです。 {\displaystyle{\frac{d}{dx}}(x^{2})=2x.}

この用法では、分母のdxは”xに関して”と読まれる。 正しい表記法の別の例は次のとおりです:
g(t)=t2+2t+4d d t g(t)=2t+2{\displaystyle{\begin{aligned}g(t)=t^{2}+2t+4\\\\{d\over dt}g(t)=2t+2\end{aligned}}}

微積分が無限小ではなく限界を使って開発されている場合でも、dxやdyのような記号を実数のように操作するのが一般的であり、このような操作を避けることは可能であるが、総導関数などの演算を表現する上で表記上便利な場合もある。
積分計算
積分計算は、定義、プロパティ、および二つの関連する概念、不定積分と定積分のアプリケーションの研究です。 積分の値を見つけるプロセスは積分と呼ばれます。 技術的な言語では、積分計算は、二つの関連する線形演算子を研究しています。不定積分は、反微分としても知られており、微分に対する逆演算です。
微分は、微分の逆演算です。
微分は、微分の逆演算です。
微分 Fがfの導関数であるとき、Fはfの不定積分である。 (関数とその不定積分のための小文字と大文字のこの使用は、微積分学では一般的です。)
定積分は関数を入力し、入力のグラフとx軸の間の領域の代数和を与える数値を出力します。 定積分の技術的な定義には、リーマン和と呼ばれる長方形の面積の合計の限界が含まれます。動機付けの例は、与えられた時間内に移動した距離です。
d i s t a n c e=S p e e dT i m e{\displaystyle\mathrm{Distance}=\mathrm{Speed}\cdot\mathrm{Time}}

速度が一定であれば乗算のみが必要であるが、速度が変化すれば、距離を求めるより強力な方法が必要である。 そのような方法の一つは、時間を多くの短い時間間隔に分割し、各間隔で経過した時間にその間隔の速度のいずれかを乗算し、各間隔で移動した近似距離の和(リーマン和)をとることによって移動距離を近似することである。 基本的な考え方は、短い時間だけが経過すると、速度は多かれ少なかれ同じままになるということです。 しかし、リーマン和は移動距離の近似を与えるだけである。 正確な移動距離を見つけるためには、そのようなすべてのリーマン和の限界を取らなければなりません。/div>
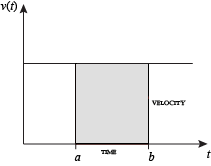

速度が一定の場合、指定された時間間隔で移動した合計距離は、速度と時間を乗算することによって計算できます。 たとえば、安定した50mphを3時間移動すると、合計距離は150マイルになります。 左の図では、一定の速度と時間をグラフ化すると、これら二つの値は、速度に等しい高さと経過時間に等しい幅を持つ長方形を形成します。 したがって、速度と時間の積は、(一定の)速度曲線の下の長方形の面積も計算します。 曲線の下の領域と移動距離との間のこの接続は、所与の期間にわたって変動する速度を示す任意の不規則な形状の領域に拡張することができる。 右の図のf(x)が時間の経過とともに変化する速度を表している場合、移動距離(aとbで表される時間の間)は影付き領域sの面積です。
その面積を近似するために、直感的な方法は、aとbの間の距離を等しいセグメントの数、記号Δ Xで表される各セグメントの長さに分割することです。 小さなセグメントごとに、関数f(x)の1つの値を選択できます。 次に、ベースΔ Xと高さhを持つ長方形の面積は、そのセグメント内を移動した距離(時間Δ Xに速度hを掛けたもの)を与えます。 そのようなすべての長方形の合計は、軸と曲線との間の面積の近似を与え、これは移動した総距離の近似である。 Δ Xの値を小さくすると、より多くの長方形が得られ、ほとんどの場合より良い近似が得られますが、正確な答えを得るには、Δ Xがゼロに近づくにつれて
積分の記号は∫{\displaystyle\int}

であり、細長いS(Sは”sum”の略)である。 定積分は次のように書かれています: ∫a b f(x)d x. {\displaystyle\int_{a}f{b}f(x)\,dx.}\,\,\,\,\,\,\,\,\,\,\}
 ≤a b≤d x{\displaystyle\int_{a}.{b}\cdots\,dx}
≤a b≤d x{\displaystyle\int_{a}.{b}\cdots\,dx}

という表記は、関数を入力として取り、数値、面積を出力として与える演算子として理解されるべきである。 終端の微分dxは数ではなく、f(x)で乗算されていないが、Δ X極限の定義を思い出させるものとして、積分の記号的操作でそのように扱うことができる。 形式的には、微分は関数が積分される変数を示し、積分演算子の閉じ括弧として機能します。不定積分(antiderivative)は次のように書くことができる。
不定積分(antiderivative)は次のように書くことができる。
≤f(x)d x。 {\displaystyle\int f(x)\,dx.}

定数だけ異なる関数は同じ導関数を持ち、与えられた関数の逆導関数は実際には定数だけ異なる関数の族であることを示すことができます。 Cは任意の定数である関数y=x2+Cの導関数はy’=2xであるため、後者の反微分は次のように与えられる。
≤2x d x=x2+C。 {\displaystyle\int2x\,dx=x^{2}+C.}

不定積分または反微分に存在する不特定の定数Cは積分定数として知られている。
基本定理
微積分の基本定理は、微分と積分が逆演算であることを述べています。 より正確には、それは反微分の値を明確な積分に関連付ける。 通常、定積分の定義を適用するよりも反微分を計算する方が簡単であるため、微積分の基本定理は定積分を計算する実用的な方法を提供します。 また、微分が積分の逆であるという事実の正確な記述として解釈することもできます。
微積分の状態の基本定理: 関数fが区間上で連続であり、fが区間(a,b)上で微分がfである関数であれば、≤a b f(x)d x=F(b)−F(a)である。 {\displaystyle\int_{a}f{b}f(x)\,dx=F(b)−F(a)である。 int int_{a}f{b}f(x)dx=F(b)-F(a)dxとなります。さらに、区間(a,b)内のすべてのxに対して、
d d x≤a x f(t)d t=f(x)である。 {\displaystyle{\frac{d}{dx}}\int_{a}x{x}f(t)\,dt=f(x)である。 frac int_a^x f(t)\、dt=f(x).とすると、frac\int_a^x f(t)\、dt=f(x).となります。
ニュートンとライプニッツの両方によって作られたこの実現は、アイザック-バローによる以前の仕事に彼らの結果を基づいて、彼らの仕事が知 基本定理は、反微分方程式の公式を見つけることによって、限界過程を実行せずに多くの定積分を計算する代数的方法を提供する。 また、微分方程式のプロトタイプ解でもあります。 微分方程式は未知の関数をその導関数に関連させ、科学では遍在しています。