Muutosnopeudet
lineaariset funktiot pätevät reaalimaailman ongelmiin, joihin liittyy vakionopeus.
oppimistavoitteet
sovelletaan lineaarisia yhtälöitä muutosnopeuksia koskevien ongelmien ratkaisemiseen
avainpisteet
avainpisteet
- Jos tiedät reaalimaailman ongelman olevan lineaarinen, kuten matkan, jonka kuljet lenkille lähtiessäsi, voit piirtää funktion ja tehdä joitakin oletuksia vain kahdella pisteellä.
- funktion kulmakerroin on sama kuin riippuvan muuttujan (y) muutosnopeus. Esimerkiksi, jos kuvaat etäisyys vs. aika, niin kaltevuus on kuinka nopeasti etäisyys muuttuu ajan, tai toisin sanoen, nopeus.
Avaintermit
- muutosnopeus: kahden toisiinsa liittyvän muuttuvan suureen suhde.
- lineaarinen yhtälö: ensimmäisen asteen polynomiyhtälö (kuten x=2y-7).
- kaltevuus: kahden pisteen pystysuorien ja vaakasuorien etäisyyksien suhde suoralla; nolla, jos suora on vaakasuora, määrittelemätön, jos se on pystysuora.
muutosnopeus
lineaarisissa yhtälöissä on usein mukana muutosnopeus. Esimerkiksi nopeutta, jolla etäisyys muuttuu ajan myötä, kutsutaan nopeudeksi. Jos tiedetään kaksi pistettä ajassa ja kuljettu kokonaismatka, voidaan määrittää muutosnopeus, joka tunnetaan myös nimellä kaltevuus. Näistä tiedoista voidaan kirjoittaa lineaarinen yhtälö, jonka jälkeen voidaan tehdä ennusteita janan yhtälöstä.
Jos yksikköä tai suuretta, jonka suhteen jokin on muuttumassa, ei ole määritelty, yleensä nopeus on aikayksikköä kohti. Yleisin nopeustyyppi on” aikayksikköä kohti”, kuten nopeus, syke ja vuo. Suhdelukuja, joilla on ei-ajallinen nimittäjä, ovat valuuttakurssit, lukutaito ja sähkökenttä (voltteina/metri).
nopeuden yksiköitä kuvatessa käytetään sanaa ”per” erottamaan toisistaan nopeuden laskemiseen käytettyjen kahden mittauksen yksiköt (esimerkiksi syke ilmaistaan ”lyöntejä minuutissa”).
muutosnopeus: Real World Application
urheilija aloittaa normaaliharjoittelun seuraavaa maratonia varten illan aikana. Kello 18 Hän lähtee juoksemaan ja lähtee kotoaan. Kello 19.30 urheilija päättää juoksun kotonaan ja on juossut yhteensä 7,5 kilometriä. Kuinka nopea hänen keskinopeutensa oli juoksun aikana?
muutosnopeus on hänen juoksunsa nopeus; matka ajan kuluessa. Kaksi muuttujaa ovat siis aika (x) ja etäisyys (y). Ensimmäinen piste on hänen kotonaan, jossa hänen kellonsa luki kello 18.00. Tämä on alkamisaika, joten asetetaan se arvoon 0. Ensimmäinen pisteemme on siis (0,0), koska hän ei juossut vielä mihinkään. Mietitään aikaa tunneissa. Toinen piste on 1,5 tuntia myöhemmin, ja juoksimme 7,5 mailia. Toinen piste on (1,5, 7,5). Meidän nopeus (muutosnopeus) on yksinkertaisesti kaltevuus linja yhdistää kaksi pistettä. Kulmakerroin, jonka antaa: m = \frac{y_{2} – y_{1}}{x_{2}-x_{1}}, muuttuu m = \frac{7.5}{1.5}=5 mailia tunnissa.
esimerkki: kuvaa nopeutta kuvaava viiva
tämän viivan kuvaamiseksi tarvitaan y-katkaisija ja kaltevuus yhtälön kirjoittamiseen. Rinne oli 5 mailia tunnissa ja koska lähtöpiste oli (0,0), y-leikkaus on 0. Lopullinen funktiomme on siis y=5x.
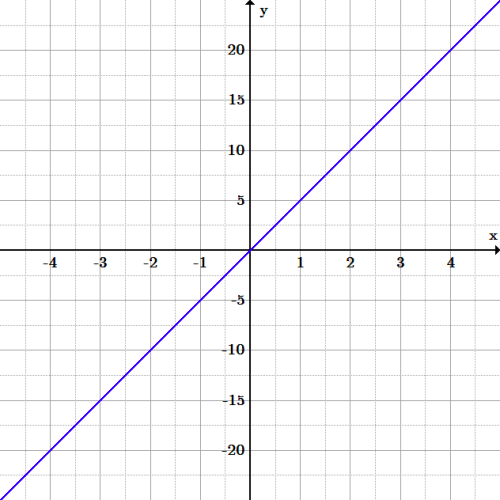
Etäisyys ja aikagrammi: kuvaaja y=5x. kaksi muuttujaa ovat aika (x) ja etäisyys (y). Juoksijan nopeus on 5 mailia tunnissa. Graafin avulla voidaan tehdä ennusteita olettaen, että hänen keskinopeutensa pysyy samana.
tämän uuden funktion avulla voimme nyt vastata muutamiin lisäkysymyksiin.
- montako kilometriä hän juoksi ensimmäisen puolen tunnin jälkeen? Yhtälön avulla, jos x=\frac{1}{2}, ratkaistaan Y: lle. Jos y=5x, niin y=5(0.5)=2.5 mailia.
- Jos hän olisi juossut samaa tahtia yhteensä 3 tuntia, kuinka monta kilometriä hän on juossut? Jos x=3, ratkaista y. Jos y=5x, sitten y=5 (3)=15 mailia.
tällaisia sovelluksia lineaarisille yhtälöille on monia. Kaikki, mihin liittyy tasaista muutosvauhtia, voidaan esittää kauniisti Rinteen linjoilla. Todellakin, niin kauan kuin sinulla on vain kaksi pistettä, jos tiedät funktio on lineaarinen, voit piirtää sen ja alkaa esittää kysymyksiä! Varmista, että pyytämäsi ja piirtämäsi asiat ovat järkeviä. Esimerkiksi Marathonin esimerkissä verkkotunnus on oikeastaan vain x\geq0, koska ei ole järkevää mennä negatiiviseen aikaan ja menettää maileja!
lineaariset matemaattiset mallit
lineaariset matemaattiset mallit kuvaavat reaalimaailman sovelluksia viivoilla.
oppimistavoitteet
sovelletaan lineaarisia matemaattisia malleja reaalimaailman ongelmiin
avainkohtiin
- matemaattinen malli kuvaa järjestelmää, jossa käytetään matemaattisia käsitteitä ja kieltä.
- lineaarisia matemaattisia malleja voidaan kuvata viivoilla. Esimerkiksi auto menee 50 mph, on kulkenut matkan edustaa y=50x, jossa x on aika tunteina ja y on mailia. Yhtälön ja kaavion avulla voidaan tehdä ennusteita.
- reaalimaailman sovelluksia voidaan mallintaa myös useilla linjoilla, kuten Jos kaksi junaa kulkee toisiaan kohti. Kohta, jossa kaksi linjaa risteävät, on kohta, jossa junat kohtaavat.
Avaintermit
- matemaattinen malli: Abstrakti matemaattinen esitys prosessista, laitteesta tai käsitteestä; se käyttää useita muuttujia edustamaan panoksia, tuotoksia, sisäisiä tiloja sekä yhtälöiden ja epäyhtälöiden joukkoja kuvaamaan niiden vuorovaikutusta.
- lineaarinen regressio: Lähestymistapa riippuvan muuttujan y ja riippumattoman muuttujan x lineaarisen suhteen mallintamiseen.
matemaattiset mallit
matemaattinen malli on kuvaus järjestelmästä, jossa käytetään matemaattisia käsitteitä ja kieltä. Matemaattisia malleja käytetään Luonnontieteiden ja insinööritieteiden lisäksi myös yhteiskuntatieteissä. Lineaarinen mallinnus voi sisältää väestönmuutoksen, puhelumaksut, pyörän vuokraamisen kustannukset, painonhallinnan tai varainhankinnan. Lineaarisessa mallissa muutosnopeus (m) ja alkusumma, y-leikkaus b. Kun malli on kirjoitettu ja viivan kuvaaja on tehty, voidaan jompaakumpaa käyttää ennustamaan käyttäytymistä.
tosielämän lineaarinen malli
monet arkiset toimet vaativat matemaattisten mallien käyttöä, ehkä tiedostamattakin. Yksi matemaattisten mallien vaikeus piilee reaalimaailman sovelluksen kääntämisessä tarkaksi matemaattiseksi esitykseksi.
esimerkki: muuttoauton vuokraaminen
vuokraamo veloittaa muuttoauton vuokraamisesta 30 dollaria ja lisäksi 0,25 dollaria maililta. Kirjoita lineaarinen yhtälö likimääräinen kustannukset y (dollareissa) suhteen x, määrä mailia ajettu. Paljonko 75 kilometrin matka maksaisi?
käyttäen lineaarisen yhtälön kulmakertoimen muotoa, jossa kokonaiskustannukset merkitään y (riippuva muuttuja) ja kilometrit merkitään x (riippumaton muuttuja):
\displaystyle y=mx+b
kokonaiskustannukset ovat yhtä suuret kuin nopeus mailia kohti kerrottuna ajettujen mailien määrällä ja kiinteän maksun kustannuksilla:
\displaystyle y=0,25 x+30
75 mailin kustannusten laskemiseksi trip, korvaa 75 x yhtälöön:
\displaystyle \begin{align} y& = 0,25 x + 30\\ &&&=48.75 \end{align}
tosielämän malli, jossa on useita yhtälöitä
on myös mahdollista mallintaa useita viivoja ja niiden yhtälöitä.
esimerkki
aluksi junat A ja B ovat 325 mailin päässä toisistaan. Juna A kulkee kohti B: tä 80 mailin tuntivauhdilla ja juna B kulkee kohti A: ta 80 mailin tuntivauhdilla. Mihin aikaan junat kohtaavat? Kuinka kauas junat tällä hetkellä kulkivat?
ensin aloitetaan junien lähtöasemista (y-intercepts, b). Juna a alkaa lähtö, (0,0). Koska juna B on alun perin 325 mailin päässä junasta a, sen sijainti on (0,325).
toiseksi, jotta voidaan kirjoittaa yhtälöt, jotka kuvaavat kunkin junan kokonaismatkaa ajallisesti, lasketaan kunkin junan muutosnopeus. Koska juna A kulkee kohti junaa B, jolla on suurempi y-arvo, junan a muutosnopeuden on oltava positiivinen ja yhtä suuri kuin sen nopeus 50. Juna B kulkee kohti A: ta, jonka y-arvo on pienempi, jolloin B: n muutosnopeus on negatiivinen: -80.
nämä kaksi rataa ovat siis:
\displaystyle y_A=50x\\
ja:
\displaystyle y_B=−80x+325
nämä kaksi junaa kohtaavat siellä, missä nämä kaksi rataa leikkaavat toisensa. Jos haluat selvittää, missä kaksi rataa leikkaavat, aseta yhtälöt keskenään ja ratkaise X: lle:
\displaystyle y_{a}=y_{b}
\displaystyle 50x=-80x+325
ratkaiseminen X: lle antaa:
\displaystyle x=2,5
kaksi junaa kohtaavat toisensa 2,5 tunnin kuluttua. Löytää missä tämä on, plug 2.5 osaksi joko yhtälö.
sen liittäminen ensimmäiseen yhtälöön antaa meille 50(2,5)=125, eli se täyttää 125 mailin matkan jälkeen.
tässä on kahden junan välimatka vs. aika-graafinen malli:
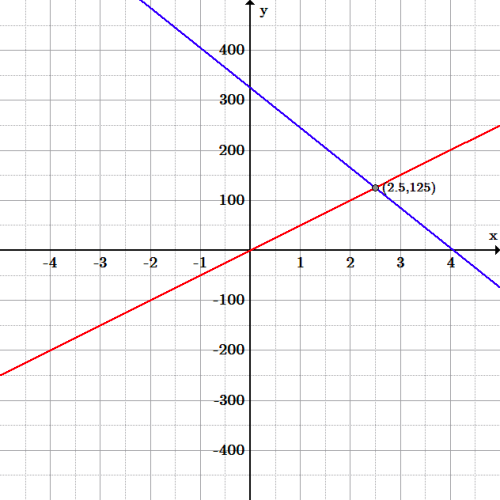
junat: junaa a (punainen linja) edustaa yhtälö: y=50x, ja junaa B (sininen linja) edustaa yhtälö: y= – 80x+325. Kaksi junaa kohtaavat risteyskohdassa (2,5,125), joka on 125 mailin jälkeen 2,5 tunnissa.
käyrän sovittaminen
käyrän sovittaminen viivalla yrittää piirtää viivan niin, että se ”sopii parhaiten” kaikkiin tietoihin.
oppimistavoitteet
pienimmän neliösumman regressiokaavan avulla lasketaan rivi, joka sopii parhaiten pistejoukolle
Key Takeaways
Key Points
- käyrän sovitus on hyödyllinen löydettäessä käyrä, joka sopii parhaiten aineistoon. Tämä mahdollistaa oletukset siitä, miten tieto karkeasti jakautuu, ja ennustukset tulevista datapisteistä.
- lineaarinen regressio yrittää piirtää viivan, joka sopii parhaiten aineistoon.
- tavallinen pienimmän neliösumman approksimaatio on lineaarisen regression tyyppi, joka minimoi approksimoidun arvon (suorasta) ja todellisen arvon erotuksen neliöiden summan.
- n datapisteitä approksimoivan suoran kulmakerroin saadaan m=\frac{\sum_{i=1}^{n}x_{i}y_{i}-\frac{1}{n}\sum_{i=1}^{n}x_{i}\sum_{j=1}^{n}y_{j}}{\sum_{i=1}^{n}(x_{i}^{2})-\frac{1}{n}(\sum_{i=1}^{n}x_{i})^{2}}.
- n datapisteitä approksimoivan suoran y-leikkaus saadaan: b= \displaystyle{\frac{1}{n} \sum_{i=1}^{n} y_{1} – m \frac{1}{n} \sum_{i=1}^{n} x_{I} = \left (\bar{y} – M \bar{x} \right)}
keskeiset termit
- käyrän sovitus: käyrän tai matemaattisen funktion muodostamisprosessi, jolla on paras sopii useisiin datapisteisiin, mahdollisesti rajoitusten alaisena.
- outlier: tilastollisen otoksen arvo, joka ei sovi kuvioon eikä kuvaa useimpia muita datapisteitä.
- pienimmän neliösumman approksimaatio: yritys minimoida ennustetun pisteen ja todellisen pisteen välisen neliömäisen etäisyyden summat.
- lineaarinen regressio: lähestymistapa riippuvan muuttujan y: n ja riippumattoman muuttujan x: n lineaarisen suhteen mallintamiseen.
käyrän sovitus
käyrän sovitus on prosessi, jossa muodostetaan käyrä tai matemaattinen funktio, joka sopii parhaiten tietopisteiden sarjaan, mahdollisesti rajoitusten alaisena. Käyrän sovittamiseen voi liittyä joko interpolointi, jossa tarvitaan tarkka sovitus dataan, tai tasoitus, jossa on rakennettu ”sileä” funktio, joka suunnilleen sopii dataan. Sovitettuja käyriä voidaan käyttää apuna datan visualisoinnissa, päättelemään arvoja funktiosta, jossa tietoja ei ole saatavilla, ja summaamaan kahden tai useamman muuttujan välisiä suhteita. Ekstrapoloinnilla tarkoitetaan sellaisen sovitetun käyrän käyttöä, joka ylittää havaittujen tietojen vaihteluvälin, ja siihen liittyy suurempi epävarmuus, koska se voi heijastaa käyrän muodostamisessa käytettyä menetelmää yhtä paljon kuin se heijastaa havaittuja tietoja.
tässä osiossa sovitetaan vain viivoja datapisteisiin, mutta on huomattava, että dataan voidaan sovittaa polynomifunktioita, ympyröitä, piece-wise-funktioita ja mitä tahansa funktioita, ja se on vahvasti käytetty aihe tilastoissa.
Lineaarinen Regressiokaava
lineaarinen regressio on lähestymistapa, jolla mallinnetaan riippuvaisen muuttujan y ja riippumattoman muuttujan x välinen lineaarinen suhde. lineaarisella regressiolla saadaan lineaarinen leikkausviivamuoto y=mx+b, joka ”sopii parhaiten” aineistoon.
yksinkertaisin ja ehkä yleisin lineaarinen regressiomalli on tavallinen pienimmän neliösumman approksimaatio. Tällä approksimaatiolla pyritään minimoimaan janan ja jokaisen pisteen välisen neliömäisen etäisyyden summat.
\displaystyle m=\frac{\sum_{i=1}^{n}x_{i}y_{i}-\frac{1}{n}\sum_{i=1}^{n}x_{i}\sum_{j=1}^{n}y_{j}}{\sum_{i=1}^{n}(x_{i}^{2})-\frac{1}{n}(\sum_{i=1}^{n}x_{i})^{2}}
löytääksesi parhaiten sopivan janan kaltevuuden, laske seuraavat vaiheet:
- x-ja y-koordinaattien tulon summa \sum_{i=1}^{n}x_{i}y_{i}.
- X-koordinaattien summa \sum_{i=1}^{n}x_{i}.
- y-koordinaattien summa \sum_{j=1}^{n}y_{j}.
- x-koordinaattien neliöiden summa \sum_{i=1}^{n}(x_{I}^{2}).
- neliöllisten x-koordinaattien summa (\sum_{i=1}^{n}x_{I})^{2}.
- osoittajan ja nimittäjän osamäärä.
\displaystyle \begin{align} b&= \frac{1}{n} \sum_{i=1}^{n} \sum_{i=1}^{n} x_{i} \ \ &= \ left (\bar{y} – m\bar{x} \right) \end{align}
y – leikkauspisteen (B) löytämiseksi lasketaan seuraavien vaiheiden avulla:
- y-koordinaattien keskiarvo. Olkoon \bar{y}, lausutaan y-bar, kaikkien datapisteiden keskiarvo (tai keskiarvo) y: \bar y =\frac{1}{n}\sum_{i=1}^{n} y_{i}.
- X-koordinaattien keskiarvo. Vastaavasti \bar{x}, lausutaan x-bar, on kaikkien datapisteiden keskiarvo (tai keskiarvo) x: \bar x=\frac{1}{n}\sum_{i=1}^{n} x_{i}.
- korvaa arvot edellä olevaan kaavaan b=\bar{y} – m \bar{x}.
käyttämällä näitä arvoja m ja b meillä on nyt suora, joka approksimoi graafin pisteitä.
esimerkki: kirjoitetaan pienimmän neliösumman sovitusjono ja sitten kaavitaan Jana, joka sopii parhaiten dataan
, Kun N = 8 pistettä: (-1,0),(0,0),(1,1),(2,2),(3,1),(4,2.5),(5,3) ja (6,4).
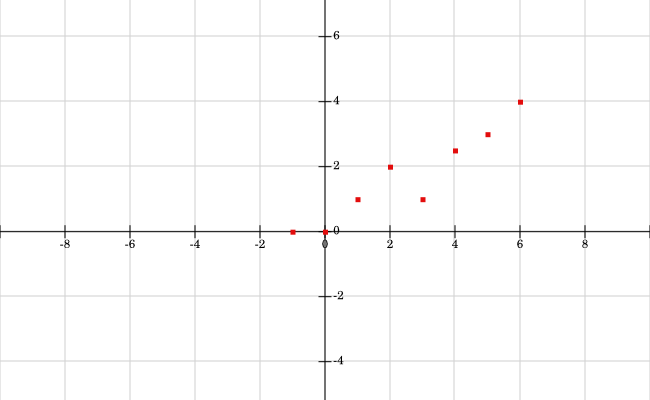
Esimerkkipisteet: pisteet on kaavoitettu sirontapisteellä.
etsi ensin se kaltevuus (m) ja y-leikkaus (b), joka parhaiten likiarvioi tätä tietoa, käyttäen edeltävän osion yhtälöitä:
löytää kulmakerroin, laske:
- X-ja y-koordinaattien tulon summa \sum_{i=1}^{n}x_{i}y_{i}.
- X-koordinaattien summa \sum_{i=1}^{n}x_{i}.
- y-koordinaattien summa \sum_{i=1}^{n}y_{i}.
\displaystyle \begin{align} \sum_{i=1}^{n}x_{i}y_{i}&&=57 \end{align} \displaystyle \begin{align} \sum_{i=1}^{n}x_{i}&&=20 \end{align}\displaystyle \begin{align} \sum_{i=1}^{n}y_{i}&&=13.5 \end{align}
\displaystyle m=\frac{\sum_{i=1}^{n}x_{i}y_{i}-\frac{1}{n}\sum_{i=1}^{n}x_{i}\sum_{j=1}^{n}y_{j}}{\sum_{i=1}^{n}(x_{i}^{2})-\frac{1}{n}(\sum_{i=1}^{n}x_{i})^{2}}
4. Laske Osoittaja: X
: n ja y-koordinaattien tulo
miinus yksi kahdeksasosa X-koordinaattien ja y-koordinaattien summan tulo:
\displaystyle \sum_{i=1}^{n}x_{i}y_{i}-\frac{1}{n}\sum_{i=1}^{n}x_{I}\sum_{j=1}^{n}y_{j}
kulmakertoimen osoittaja on:
\displaystyle 57-\frac{1}{8}(20)(13.5)=23.25
5. Laske nimittäjä:
X-koordinaattien neliöiden summa miinus kahdeksasosa neliöidyn X-koordinaatin summa:
\displaystyle \sum_{i=1}^{n}(x_{I}^{2})-\frac{1}{n}(\sum_{i=1}^{n}x_{I})^{2}
\displaystyle \begin{align} \sum_{i=1}^{n}(x_{I}^{2})&&=92 \end{align}
nimittäjä on 92 – \frac{1}{8}(20)^{2}=92-50=42 ja kulmakerroin on osoittajan ja nimittäjän osamäärä: \frac{23.25}{42}\approx0. 554.
nyt y-leikkauspisteessä B) kahdeksasosa X-koordinaattien keskiarvosta: \bar{x}=\frac{20}{8}=2.5 ja kahdeksasosa kertaa y-koordinaattien keskiarvo: \bar{y}=\frac{13.5}{8}=1.6875.
siksi B=\frac{1}{n} \sum_{i=1}^{n} y_{1} – m \frac{1}{n} \sum_{i=1}^{n} x_{i} \\:
\displaystyle b\approx1.6875-0.554(2.5)=0.3025.
lopullinen yhtälömme on siis y=0,554 x+0,3025, ja tämä Jana piirretään pisteiden mukaan.
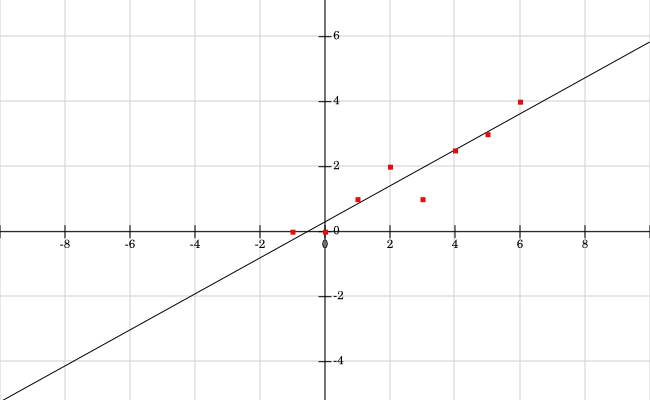
pienimpien neliöiden Sopivuusrivi: Pienimmän neliösumman likiarvon osoittama viiva, y = 0,554 x+0,3025. Huomaa 4 pistettä ovat viivan yläpuolella ja 4 pistettä viivan alapuolella.
poikkeamat ja pienimmän neliösumman regressio
Jos meillä on piste, joka on kaukana approksimoivasta suorasta, niin se vääristää tulokset ja tekee suorasta paljon huonomman. Sanotaan esimerkiksi alkuperäisessä esimerkissämme pisteen (-1,0) sijasta meillä on (-1,6).
käyttäen samoja laskutoimituksia kuin edellä uuden pisteen kanssa, tulokset ovat:m\approx0.0536 ja b\approx2.3035, jolloin saadaan Uusi yhtälö y=0.0536 x+2.3035.
kun tarkastellaan alla olevan uuden kuvan pisteitä ja viivaa, tämä uusi rivi ei sovi aineistoon hyvin, johtuen outlierista (-1,6). Itse, yrittää sovittaa lineaarisia malleja tietoja, jotka ovat quadratic, kuutiometriä, tai mitään ei-lineaarisia, tai tiedot, joissa on monia poikkeamia tai virheitä voi johtaa huonoihin likiarvot.
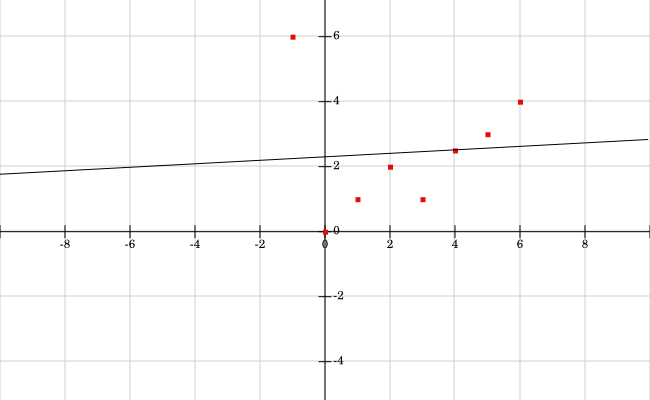
Outier Approximated Line: Tässä approximated line annetaan uusi outier piste (-1, 6).