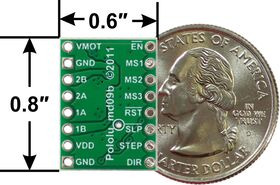
a4983/A4988 askelmoottorinkuljettaja mittoineen.
yleiskatsaus
Tämä tuote on Allegron A4988 DMOS Microstepping-ajurille tarkoitettu kantolevy tai purkautumistaulu, jossa on kääntäjä ja ylivirtasuoja; suosittelemme siksi A4988-datalehden (1MB pdf) huolellista lukemista ennen tämän tuotteen käyttöä. Tämä askelmoottori kuljettaja voit control yksi bipolaarinen askelmoottori enintään 2 Lähtövirta per kela (katso teho hajonta näkökohdat osiossa alla lisätietoja). Tässä muutamia kuljettajan keskeisiä ominaisuuksia:
- yksinkertainen askel-ja suuntaohjausliitäntä
- viisi eri askeltarkkuutta: full-step, half-step, quarter-step, kahdeksas-step, and sixth-step
- säädettävän virran ohjauksen avulla voit asettaa maksimivirran potentiometrillä, jonka avulla voit käyttää stepperimoottorin nimellisjännitettä ylittäviä jännitteitä suurempien askelnopeuksien saavuttamiseksi
- älykäs pilkkomisohjaus, joka valitsee automaattisesti oikean virtahajoamisen tilan (nopea hajoaminen tai hidas hajoaminen)
- ylilämpötilan terminen sammutus, alijännitteen lukitus ja crossover-virransuojaus
- Short-to-ground ja oikosulkusuojaus
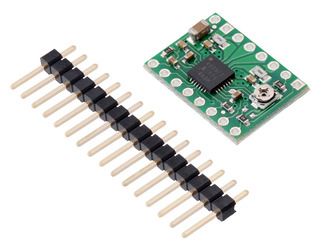
Tämä tuote alukset kaikilla pinta-asennuksilla komponentit – mukaan lukien A4988 driver IC-asennettuna tuotekuvan mukaisesti.
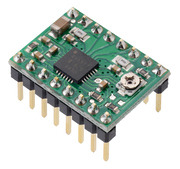
Tämä tuote toimitetaan yksittäin pakattuina 0.1″ urospuolisilla otsake-pinneillä, jotka ovat mukana, mutta joita ei ole juotettu; meillä on myös versio, jossa urospuoliset otsake-nastat on jo Juotettu. Asiakkaille, jotka ovat kiinnostuneita suuremmista määristä alhaisemmilla yksikkökustannuksilla, tarjoamme irtotavarana pakatun version ilman otsaketappeja ja irtotavarana pakatun version, jossa otsaketapit on asennettu.
huomaa, että meillä on useita stepperimoottoreita, joita voidaan käyttää vaihtoehtoina tälle moduulille (ja pudotusvaihteina monissa sovelluksissa):
- Black Edition A4988 stepper motor driver carrier on saatavana noin 20% paremmalla suorituskyvyllä; lämpöominaisuuksia lukuun ottamatta Black Edition ja tämä (vihreä) lauta ovat vaihdettavissa.
- MP6500-alusta voi tuottaa jopa 1,5 A per vaihe (jatkuva) ilman jäähdytyslevyä ja se on saatavana kahtena versiona, joista toisessa on pot nykyisen rajan ohjaamiseksi ja toisessa digitaalinen virtarajavalvonta dynaamisen virran rajan säätämiseksi mikrokontrollerilla.
- DRV8825-kantoauto tarjoaa noin 50% paremman suorituskyvyn laajemmalla jännitealueella ja siinä on muutamia lisäominaisuuksia.
- DRV8834-kantoauto toimii moottorin syöttöjännitteellä, joka on niinkin alhainen kuin 2,5 V, joten se soveltuu pienjännitesovelluksiin.
- DRV8880-kantaja tarjoaa dynaamisesti skaalautuvan virran rajoittamisen ja ”Autotunen”, joka valitsee automaattisesti jokaisen PWM-syklin hajoamistilan optimaaliseksi virransäätelyksi perustuen tekijöihin, kuten moottorin käämitysvastukseen ja induktanssiin sekä Moottorin dynaamiseen nopeuteen ja kuormitukseen.
myymme myös suurempaa versiota A4988-kantoautosta, jossa on päävirtasuojaus ja sisäänrakennetut 5 V: n ja 3,3 V: n jännitesäätimet, jotka poistavat erillisen logiikan ja moottoritoimituksen tarpeen.
jotkut unipolaariset askelmoottorit (esimerkiksi ne, joissa on kuusi tai kahdeksan johtoa) voidaan ohjata tällä ohjaimella bipolaarisina askelmoottoreina. Katso lisätietoja usein kysytyistä kysymyksistä. Unipolar-moottoreita, joissa on viisi johtoa, ei voida käyttää tämän kuljettajan kanssa.
mukana laitteisto
A4988 stepper motor driver carrierissa on yksi 1×16-nastainen 0,1″ urospuolinen header. Otsikot voidaan Juotettu käytettäväksi solderless breadboards tai 0,1″ naaras liittimet. Voit myös juottaa Moottorin johdot ja muut yhteydet suoraan hallituksen. (Saatavilla on myös versio tästä laudasta, jossa on jo asennetut otsikot.)
|
|
|
kuljettajan käyttäminen
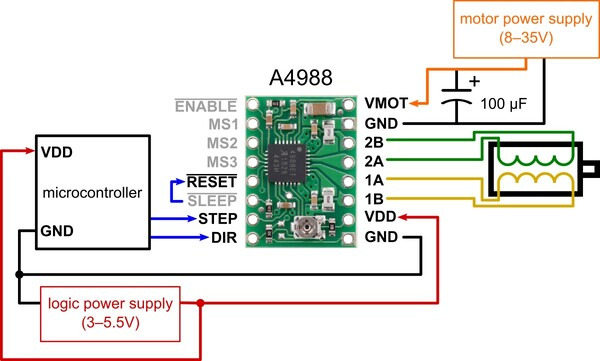
minimaalinen kytkentäkaavio mikrokontrollerin liittämiseksi A4988-askelmoottorikuljettimen kuljettimeen (täysaskeltatila).
virtaliitännät
ajuri vaatii loogisen syöttöjännitteen (3 – 5.5 V) kytkettävä VDD – ja GND-nastoihin ja Moottorin Syöttöjännite (8-35 V) kytkettäväksi vmot: n ja GND: n välille. Näissä tarvikkeissa olisi oltava asianmukaiset irrotuskondensaattorit lähellä levyä, ja niiden olisi pystyttävä tuottamaan odotetut virrat (piikit jopa 4 A Moottorin syöttöön).
Varoitus: Tämä kantolevy käyttää low-ESR keraamisia kondensaattoreita, mikä tekee siitä altis tuhoisille LC-jännitteen piikeille, varsinkin käytettäessä tehojohtimia, jotka ovat pidempiä kuin muutaman tuuman. Oikeissa olosuhteissa nämä piikit voivat ylittää A4988: n 35 V: n enimmäisjännitteen ja vaurioittaa levyä pysyvästi, vaikka moottorin syöttöjännite on niinkin alhainen kuin 12 V. yksi tapa suojata kuljettajaa tällaisilta piikeiltä on laittaa suuri (vähintään 47 µF) elektrolyyttikondensaattori moottorin tehon (VMOT) poikki ja maahan jonnekin lähelle levyä.
Moottoriliitännät
neljä -, kuusi-ja kahdeksanvaijerisia askelmoottoreita voidaan ajaa A4988: lla, jos ne on kytketty oikein; UKK: n vastaus selittää asianmukaiset johdotukset yksityiskohtaisesti.
Varoitus: Askelmoottorin kytkeminen tai irrottaminen kuljettajan ollessa kytkettynä voi tuhota kuljettajan. (Yleisemmin, uudelleen johtaminen mitään, kun se on powered vaatii ongelmia.)
Step (ja microstep) koko
Stepperimoottoreilla on tyypillisesti porraskokoeritelmä (esim.1,8° tai 200 askelta kierrosta kohti), joka koskee täysiä askelia. Microstepping kuljettaja, kuten A4988 mahdollistaa korkeammat resoluutiot sallimalla välivaiheen sijainnit, jotka saavutetaan energisoimalla kelat välivirtatasoilla. Esimerkiksi moottorin ajaminen neljännesaskelaskelmatilassa antaa 200-askeliselle kierrokselle 800 mikroaskelta kierrosta kohden käyttämällä neljää eri virtatasoa.
erotuskyvyn (askelman koko) valintatulot (MS1, MS2 ja MS3) mahdollistavat valinnan viiden askeleen resoluutioista alla olevan taulukon mukaisesti. MS1 ja MS3 on sisäinen 100kω vetovastukset ja MS2 on sisäinen 50kω vetovastus, joten jättäen nämä kolme microstep valinta nastat irrotettu johtaa kokoaskel-tilassa. Jotta microstep-tilat toimivat oikein, nykyinen raja on asetettava riittävän alhaiseksi(katso alla), jotta nykyinen rajoitus kytkeytyy. Muuten välivirtatasoja ei ylläpidetä oikein, ja Moottori ohittaa mikroportaat.
| MS1 | MS2 | MS3 | |
|---|---|---|---|
| Low | Low | täysi askel | |
| Low | low | half Step | |
| Low | korkea | kahdeksas vaihe | |
| korkea | korkea | korkea | kuudestoista vaihe |
kontrollitulot
jokainen Askelsyötön pulssi vastaa yhtä mikrosteppiä askelmoottori DIR-tapin valitsemaan suuntaan. Huomaa, että askel-ja DIR-nastoja ei ole vedetty mihinkään tiettyyn jännitteeseen sisäisesti, joten sinun ei pitäisi jättää kumpaakaan näistä pinneistä kellumaan sovelluksessasi. Jos haluat vain pyörimisen yhteen suuntaan, voit sitoa DIR: n suoraan VCC: hen tai GND: hen. Sirulla on kolme erilaista tuloa sen monien tehotilojen ohjaamiseen: RST, SLP ja EN. Lisätietoja näistä voimatiloista löytyy datalehdestä. Huomaa, että RST pin kelluu; jos et käytä pin, voit liittää sen viereiseen SLP pin PCB tuoda sen korkea ja jotta aluksella.
virran rajoittaminen
yksi tapa maksimoida askelmoottorin suorituskyky on käyttää niin suurta jännitettä kuin käyttökohteessa on käytännöllistä. Erityisesti jännitteen kasvattaminen mahdollistaa yleensä suuremmat askeltaajuudet ja askelmomentin, koska virta voi muuttua nopeammin keloissa jokaisen vaiheen jälkeen. Jotta askelmoottorin nimellisjännitteen ylittäviä jännitteitä voitaisiin käyttää turvallisesti, kelavirta on kuitenkin rajoitettava aktiivisesti, jotta se ei ylittäisi Moottorin nimellisvirtaa.
A4988 tukee tällaista aktiivivirran rajoittamista, ja laudan trimmeripotentiometrillä voidaan asettaa nykyinen raja. Yksi tapa asettaa nykyinen raja on laittaa kuljettaja täysaskeliseen tilaan ja mitata yhden moottorin kelan läpi kulkeva virta samalla kun säädetään nykyistä raja-potentiometriä. Tämä tulisi tehdä moottorin ollessa kiinteässä asennossa (ts. kellottamatta ASKELSYÖTTÖÄ). Huomaa, että mittaamasi virta on vain 70% todellisesta virran raja-asetuksesta, koska molemmat kelat ovat aina päällä ja rajoitettu tähän arvoon täysaskelisessa tilassa, joten jos otat myöhemmin käyttöön mikrotappotilat, kelojen läpi kulkeva virta voi ylittää tämän mitatun täyden vaiheen virran 40%: lla (1/0, 7) tietyissä vaiheissa.ota tämä huomioon, kun käytät tätä menetelmää nykyisen rajan asettamiseen. Huomaa myös, että sinun täytyy suorittaa tämä säätö uudelleen, jos joskus muutat logiikkajännitettä, Vdd, koska viitejännite, joka asettaa nykyisen rajan, on VDD: n funktio.
Huomautus: kelavirta voi olla hyvin erilainen kuin virtalähteen virta, joten virransyötöstä mitattua virtaa ei kannata käyttää virran rajan asettamiseen. Sopiva paikka laittaa nykyinen mittari on sarjassa yksi askelmoottorin kelat.
toinen tapa asettaa nykyinen raja on laskea viitejännite, joka vastaa haluttua virran rajaa ja säätää sitten virran raja-potentiometriä, kunnes mittaat jännitteen VREF-tappiin. VREF pin jännite on käytettävissä kautta, joka on ympyröity piirilevyn pohja silkkipaino. Virtaraja, IMAX, liittyy referenssijännitteeseen seuraavasti:
”I_ (MAX) = (V_ (REF)) / (8 * R_ (CS))”
tai vref: n ratkaisemiseksi uudelleen järjestettynä:
” V_ (REF) = 8 * I_(MAX) * R_(CS)`
RCS on virran aistiresistanssi; alkuperäiset versiot tämän hallituksen käytetty 0.050 Ω nykyinen sense vastukset, mutta siirryimme käyttämällä 0.068 Ω nykyinen sense vastukset tammikuussa 2017, mikä tekee enemmän säätö potentiometrin alue hyödyllinen. Seuraava kuva näyttää, miten tunnistaa, mitkä nykyiset aistivastukset laudallasi on:
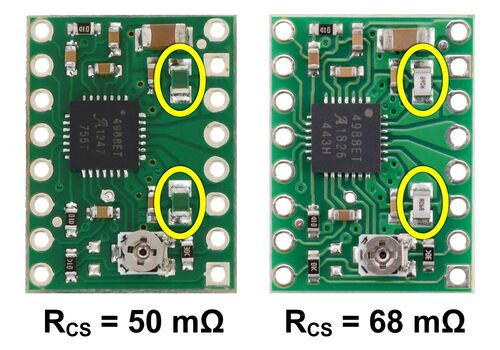
tunnistaminen alkuperäiset 50 mω sense vastukset (vasen) ja 68 mΩ sense vastukset (oikea) käyttöön tammikuussa 2017.
joten, esimerkiksi, jos haluat asettaa nykyisen rajan 1 A ja sinulla on aluksella 68 mΩ sense vastukset, voit asettaa VREF 540 mV. Näin varmistetaan, että vaikka kunkin kelan läpi kulkeva virta muuttuu vaiheesta toiseen, askelmoottorin virtavektorin suuruus pysyy vakiona 1 A: ssa:
`sqrt(I_(COIL1)^2 + I_(COIL2)^2) = I_(MAX) = 1 text (a)`
Jos sen sijaan haluat, että kunkin kelan läpi kulkeva virta on 1 A täysaskelisessa tilassa, sinun on asetettava nykyinen raja 40% korkeammaksi eli 1.4 A, koska kelat on rajoitettu noin 70% asetetun virran raja täysaskel-tilassa (yllä oleva yhtälö osoittaa, miksi näin on). Voit tehdä tämän aluksella 68 mΩ sense vastukset, voit asettaa VREF 770 mV.
tehonhäviönäkökohdat
A4988 driver IC: n enimmäisvirta on 2 A kelaa kohti, mutta todellinen virta, jonka voit antaa, riippuu siitä, kuinka hyvin pystyt pitämään IC: n viileänä. Operaattorin painettu piirilevy on suunniteltu vetämään lämpöä IC: stä, mutta toimittamaan enemmän kuin noin 1 A per kela, jäähdytyselementti tai muu jäähdytysmenetelmä tarvitaan.
Tämä tuote voi kuumentua niin paljon, että se polttaa sinut kauan ennen kuin siru ylikuumenee. Ole varovainen käsitellessäsi tätä tuotetta ja muita siihen liitettyjä komponentteja.
huomaa, että virtavirran mittaaminen virtalähteessä ei yleensä anna tarkkaa mittausta kelavirrasta. Koska kuljettajan tulojännite voi olla huomattavasti suurempi kuin kelan jännite, mitattu virta virtalähteessä voi olla melko vähän pienempi kuin kelan virta (kuljettaja ja kela toimivat periaatteessa Kytkimen askel alaspäin virtalähde). Myös, jos syöttöjännite on erittäin korkea verrattuna siihen, mitä moottori tarvitsee asetetun virran saavuttamiseksi, toimintasuhde on hyvin alhainen, mikä johtaa myös merkittäviin eroihin keskimääräisten ja RMS-virtojen välillä.
kaaviokuva
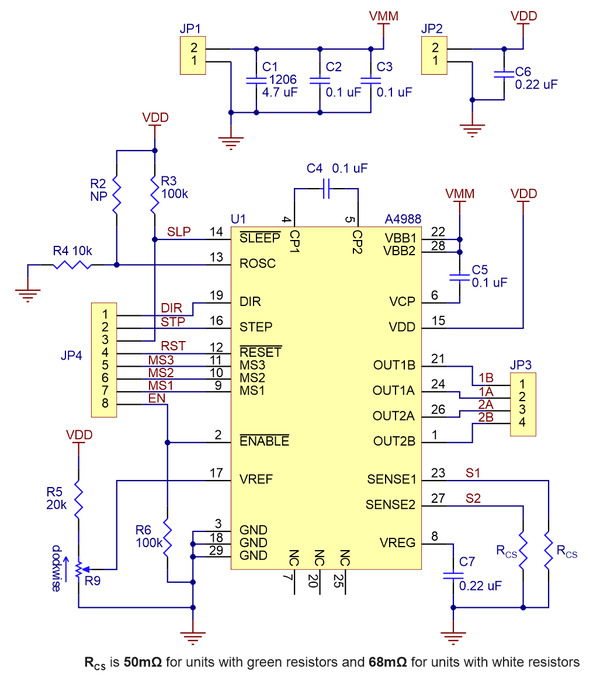
A4988-askelmoottorikuljettimen vaunu (sekä vihreä että musta painos).
Huom: Tämä lauta on korvaaja alkuperäiselle (ja nyt lopetetulle) a4983 stepper motor driver carrierille. Uudempi A4988 tarjoaa ylivirta suojaa ja on sisäinen 100k vedä alas MS1 microstep valinta pin, mutta se on muuten lähes identtinen A4983.