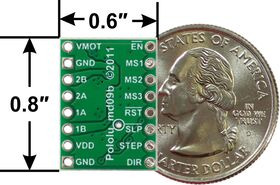
a4983/A4988 stepper motor driver carrier med dimensioner.
oversigt
dette produkt er en carrier board eller breakout board for Allegro s A4988 Dmos Microstepping Driver med Oversætter og overstrøm beskyttelse; Vi anbefaler derfor omhyggelig læsning af A4988 datablad (1MB pdf), før du bruger dette produkt. Denne stepmotordriver giver dig mulighed for at styre en bipolær stepmotor med op til 2 a Udgangsstrøm pr.spole (se afsnittet om Strømafledningsovervejelser nedenfor for mere information). Her er nogle af førerens Nøglefunktioner:
- enkel trin-og retningskontrolgrænseflade
- fem forskellige trinopløsninger: Fuldtrin, halvtrin, kvarttrin, ottende trin og sekstende trin
- Justerbar strømstyring giver dig mulighed for at indstille den maksimale strømudgang med et potentiometer, som giver dig mulighed for at bruge spændinger over din stepmotors nominelle spænding for at opnå højere trinhastigheder
- Intelligent hakningskontrol, der automatisk vælger den korrekte strømfaldstilstand (hurtigt henfald eller langsomt henfald)
- Over-temperatur termisk nedlukning, underspændingslåsning og crossover-strømbeskyttelse
- kort til jord og kortsluttet-load Protection
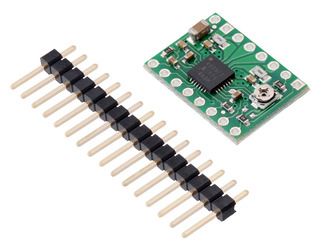
dette produkt leveres med alle overflademonteringer komponenter—inklusive A4988 driver IC-installeret som vist på produktbilledet.
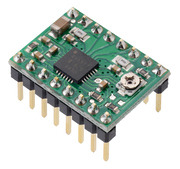
dette produkt leveres individuelt pakket med 0,1″ hanhovedstifter inkluderet, men ikke loddet ind; vi har også en version med hanhovedstifter, der allerede er loddet ind. For kunder, der er interesseret i højere volumener til lavere enhedsomkostninger, tilbyder vi en bulkpakket version uden headerpinde og en bulkpakket version med headerpinde installeret.
Bemærk, at vi har flere stepmotordrivere, der kan bruges som alternativer til dette modul (og drop-in udskiftninger i mange applikationer):
- Black Edition A4988 stepper motor driver carrier fås med cirka 20% bedre ydelse; bortset fra termiske egenskaber er Black Edition og dette (grønne) kort udskiftelige.
- mp6500-bæreren kan levere op til 1,5 A pr.fase (kontinuerlig) uden kølelegeme og fås i to versioner, en med en gryde til styring af strømgrænsen og en med digital strømgrænsekontrol til dynamisk strømgrænsejustering af en mikrocontroller.drv8825 carrier tilbyder cirka 50% bedre ydelse over et bredere spændingsområde og har et par ekstra funktioner.drv8834-bæreren arbejder med motorforsyningsspændinger så lave som 2,5 V, hvilket gør den velegnet til lavspændingsapplikationer.drv8880-bæreren tilbyder dynamisk skalerbar strømbegrænsning og” AutoTune”, som automatisk vælger henfaldstilstand for hver PM-cyklus for optimal strømreguleringsydelse baseret på faktorer som motorviklingsmodstand og induktans og motorens dynamiske hastighed og belastning.
vi sælger også en større version af A4988-bæreren, der har omvendt strømbeskyttelse på hovedindgangen og indbyggede 5 V og 3.3 V spændingsregulatorer, der eliminerer behovet for separate logik-og motorforsyninger.
nogle unipolære trinmotorer (f.eks. dem med seks eller otte ledninger) kan styres af denne driver som bipolære trinmotorer. For mere information, se de ofte stillede spørgsmål. Unipolære motorer med fem ledninger kan ikke bruges sammen med denne driver.
inkluderet isenkram
A4988 stepper motor driver carrier leveres med en 1 liter 16-bens udbrud 0,1″ hanhoved. Overskrifterne kan loddes ind til brug med loddeløse brødbrædder eller 0,1″ Hunstik. Du kan også lodde dine motorledninger og andre forbindelser direkte til brættet. (En version af dette bord med overskrifter, der allerede er installeret, er også tilgængelig.)
|
|
|
brug af driveren
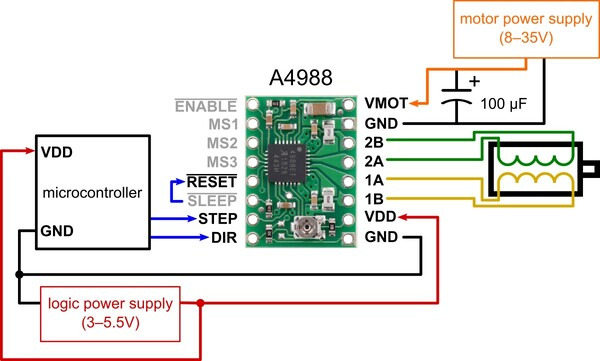
minimalt ledningsdiagram til tilslutning af en mikrocontroller til en A4988 stepper motor driver carrier (fuldtrinstilstand).
strømforbindelser
driveren kræver en logisk Forsyningsspænding (3 – 5.5 V) skal tilsluttes på tværs af VDD – og GND-stifterne og en motorforsyningsspænding (8-35 V), der skal tilsluttes på tværs af vmot og GND. Disse forsyninger skal have passende afkoblingskondensatorer tæt på brættet, og de skal være i stand til at levere de forventede strømme (toppe op til 4 A for motorforsyningen).
Advarsel: Dette bærebræt bruger keramiske kondensatorer med lav ESR, hvilket gør det modtageligt for destruktive LC-spændingsspidser, især når du bruger strømledninger længere end et par centimeter. Under de rette forhold kan disse pigge overstige 35 V maksimal spændingsklassificering for A4988 og beskadige brættet permanent, selv når motorforsyningsspændingen er så lav som 12 V. en måde at beskytte føreren mod sådanne pigge er at placere en stor (mindst 47 liter) elektrolytkondensator på tværs af motoreffekt (VMOT) og jord et sted tæt på brættet.
motorforbindelser
fire, seks og otte-leder trinmotorer kan drives af A4988, hvis de er korrekt tilsluttet; et Ofte stillede spørgsmål forklarer de korrekte ledninger i detaljer.
advarsel: Tilslutning eller frakobling af en stepmotor, mens føreren er tændt, kan ødelægge føreren. (Mere generelt, at tilslutte noget, mens det er drevet, beder om problemer.)
trin (og microstep) størrelse
stepmotorer har typisk en trinstørrelsesspecifikation (f.eks. 1,8 liter eller 200 trin pr. omdrejning), som gælder for fulde trin. En microstepping-driver som A4988 tillader højere opløsninger ved at tillade mellemliggende trinplaceringer, som opnås ved at aktivere spolerne med mellemliggende strømniveauer. For eksempel vil Kørsel af en motor i kvart-trin-tilstand give 200-trin-per-revolution-motoren 800 mikrotrin pr.
opløsnings – (trinstørrelse) – vælgerindgange (MS1, MS2 og MS3) muliggør valg fra de fem trinopløsninger i henhold til nedenstående tabel. MS1 og MS3 har interne 100k liter nedtrækningsmodstande, og MS2 har en intern 50k liter nedtrækningsmodstand, så disse tre mikrotrinsvalgstifter afbrydes, resulterer i fuldtrinstilstand. For at microstep-tilstande skal fungere korrekt, skal den aktuelle grænse indstilles lavt nok (se nedenfor), så den aktuelle begrænsning bliver aktiveret. Ellers opretholdes de mellemliggende strømniveauer ikke korrekt, og motoren springer over mikrotrin.
| MS1 | MS2 | Mikrostep opløsning | ||
|---|---|---|---|---|
| lav | lav | lav | lav | fuld trin |
| høj | lav | lav | halvtrin | |
| lav | høj | lav | kvarttrin | |
| høj | lav | ottende trin | ||
| høj | høj | sekstende trin |
kontrolindgange
hver puls til trinindgangen svarer til et mikrotrin af det trin, der er angivet i stepmotor i den retning, der er valgt af DIR-stiften. Bemærk, at trin-og DIR-stifterne ikke trækkes til nogen bestemt spænding internt, så du bør ikke lade nogen af disse stifter flyde i din applikation. Hvis du bare vil have rotation i en enkelt retning, kan du binde DIR direkte til VCC eller GND. Chippen har tre forskellige indgange til styring af sine mange strømtilstande: RST, SLP og en. For detaljer om disse strømtilstande, se databladet. Bemærk, at den første pin er flydende; hvis du ikke bruger stiften, kan du slutte den til den tilstødende SLP-stift på printkortet for at bringe den højt og aktivere tavlen.
strømbegrænsning
en måde at maksimere trinmotorens ydeevne på er at bruge så høj spænding som praktisk til din applikation. Især giver forøgelse af spændingen generelt mulighed for højere trinhastigheder og trinmoment, da strømmen kan ændre sig hurtigere i spolerne efter hvert trin. For sikkert at bruge spændinger over en trinmotors nominelle spænding skal spolestrømmen imidlertid være aktivt begrænset for at forhindre, at den overskrider motorens nominelle strøm.
A4988 understøtter en sådan aktiv strømbegrænsning, og trimmerpotentiometeret på tavlen kan bruges til at indstille strømgrænsen. En måde at indstille den aktuelle grænse på er at sætte føreren i fuldtrinstilstand og måle strømmen, der løber gennem en enkelt motorspole, mens du justerer det aktuelle grænsepotentiometer. Dette skal gøres, når motoren holder en fast position (dvs. uden at tjekke TRININDGANGEN). Bemærk, at den strøm, du måler, kun er 70% af den aktuelle strømgrænseindstilling, da begge spoler altid er tændt og begrænset til denne værdi i fuldtrinstilstand, så hvis du senere aktiverer mikrostepping-tilstande, vil strømmen gennem spolerne være i stand til at overskride denne målte fuldtrinsstrøm med 40% (1/0.7) på visse trin; vær opmærksom på dette, når du bruger denne metode til at indstille den aktuelle grænse. Bemærk også, at du bliver nødt til at udføre denne justering igen, hvis du nogensinde ændrer den logiske spænding, Vdd, da referencespændingen, der indstiller den aktuelle grænse, er en funktion af Vdd.
Bemærk: spolestrømmen kan være meget forskellig fra strømforsyningsstrømmen, så du bør ikke bruge strømmen målt ved strømforsyningen til at indstille den aktuelle grænse. Det rette sted at placere din nuværende måler er i serie med en af dine trinmotorspoler.
en anden måde at indstille den aktuelle grænse på er at beregne den referencespænding, der svarer til den ønskede strømgrænse, og derefter justere det aktuelle grænsepotentiometer, indtil du måler spændingen på VREF-stiften. VREF pin spænding er tilgængelig på en via, Der er cirklet på bunden silketryk af printkortet. I_ (maks.) = (V_ (REF)) / (8 * R_ (CS))`
eller, omarrangeret for at løse for VREF:
`V_(REF) = 8 * I_(maks.) * R_(CS) ”
RCS er den aktuelle sansemodstand; originale versioner af dette kort brugte 0,050-liters strømmodstande, men vi skiftede til at bruge 0,068-Strømmodstande i Januar 2017, hvilket gør mere af justeringspotentiometerets rækkevidde nyttigt. Følgende billede viser, hvordan du identificerer, hvilke nuværende sense-modstande dit bord har:
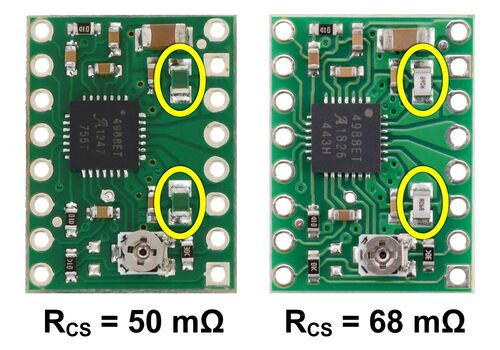
identifikation af originale 50 m-modstandsmodstande (venstre) og 68 m-modstandsmodstande (højre) introduceret i Januar 2017.
så hvis du for eksempel vil indstille den aktuelle grænse til 1 A, og du har et bord med 68 m liter sense modstande, vil du indstille VREF til 540 mV. Dette sikrer, at selvom strømmen gennem hver spole skifter fra trin til trin, forbliver størrelsen af den aktuelle vektor i trinmotoren konstant ved 1 A:
`KVRT(I_(COIL1)^2 + i_(COIL2)^2) = i_(maks) = 1 Tekst (A)`
hvis du i stedet ønsker, at strømmen gennem hver spole skal være 1 A i fuldtrinstilstand, skal du indstille den aktuelle grænse til at være 40% højere eller 1.4 A, da spolerne er begrænset til cirka 70% af den indstillede strømgrænse i fuldtrinstilstand (ligningen ovenfor viser, hvorfor dette er tilfældet). For at gøre dette med et bord med 68 m liter sense modstande, ville du indstille VREF til 770 mV.
strømafledningsovervejelser
A4988 driver IC har en maksimal strømstyrke på 2 A pr. Bærerens printkort er designet til at trække varme ud af IC, men for at levere mere end cirka 1 A pr.
dette produkt kan blive varmt nok til at brænde dig længe før chippen overophedes. Vær forsigtig, når du håndterer dette produkt og andre komponenter, der er tilsluttet det.
bemærk, at måling af strømtrækningen ved strømforsyningen generelt ikke giver et nøjagtigt mål for spolestrømmen. Da indgangsspændingen til føreren kan være betydeligt højere end spolespændingen, kan den målte strøm på strømforsyningen være ganske lidt lavere end spolestrømmen (føreren og spolen fungerer dybest set som en omskiftningsstrømforsyning). Hvis forsyningsspændingen er meget høj sammenlignet med, hvad motoren har brug for for at opnå den indstillede strøm, vil driftscyklussen være meget lav, hvilket også fører til betydelige forskelle mellem gennemsnitlige og RMS-strømme.
skematisk diagram
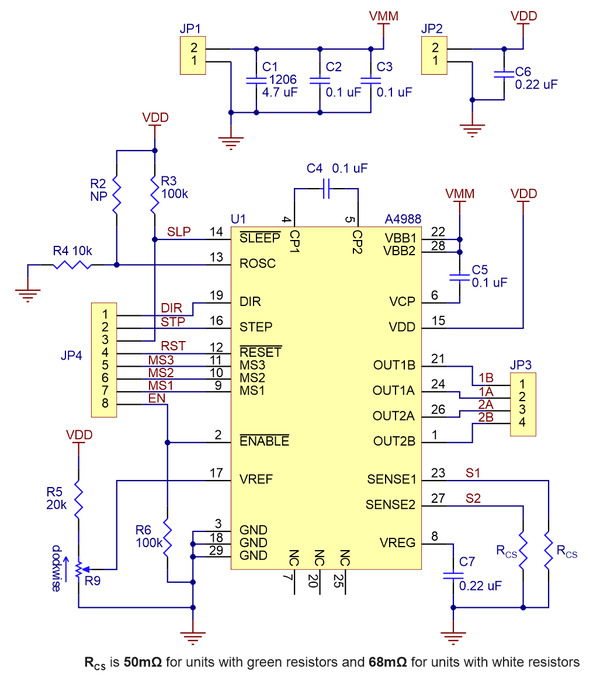
skematisk diagram af A4988 stepper motor driver carrier (både grønne og sorte udgaver).
Bemærk: Dette board er en drop-in erstatning for vores oprindelige (og nu udgået) a4983 stepper motor driver carrier. Den nyere A4988 tilbyder overstrømsbeskyttelse og har en intern 100k nedtrækning på MS1 microstep selection pin, men den er ellers næsten identisk med a4983.