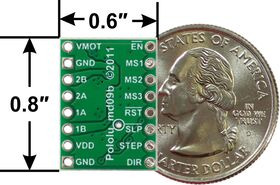
A4983/A4988 댄서 모터 운전사 캐리어입니다.
개요
이 제품은 캐리어 보드나 브레드를 알레그로의 A4988DMOS 마이크로스텝 드라이버 번역기 및 과전류 보호한다;우리는 좋습니다 따라서 주의 깊게 읽어 A4988 데이터 시트(1MB pdf)을 사용하기 전에 제품입니다. 이 스테퍼 모터 드라이버를 제어할 수 있습 중 하나는 양극 댄서 모터는 최대 2A 출력 전류별 코일(보는 힘이 분산을 고려 사항은 아래 섹션)를 이용하실 수 있습니다. 여기에 몇 가지의 주요 특징:
- 간단한 단계와 방향 제어 인터페이스
- 다섯 가지 단계는 해상도: 전체 단계,반 단계,분기 단계,여덟 번째 단계,그리고 여섯 번째 단계
- 조절가능 전류 제어 설정할 수 있습니다 최대 전류 출력 전위차계할 수 있는 사용 전압을 위한 댄서 모터의 정격 전압을 달성하기 위해 더 높은 단계 요금
- 지능형 베어는 자동으로 선택하고 올바른 현재 부패 모드(빠르고 부패하거나 쇠퇴)
- 통해온 열 셧다운, under-voltage lockout,그리고 크로스오버 현재 보호
- 짧-지상 및 단락하 보호
이 제품 선박과 함께 모든 surface-mount 제품 그림과 같이 a4988 드라이버 IC 를 포함한 구성 요소가 설치되었습니다.
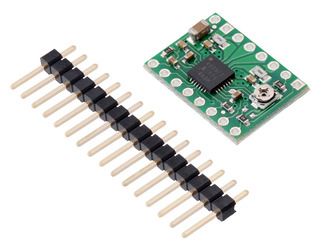
이 제품은 선박 개별 포장으로 0.1″남자 헤더 핀 포함되어 있지만 납땜에는다;우리는 또한 버전으로 남성 핀 헤더 이미 납땜습니다. 에 관심을 갖기 시작한 고객을 위한 높은 볼륨에서 더 낮은 단가,우리가 제공하는 대량 포장된 버전의 헤더없이 핀 및 대량 포장된 버전을 가진 헤더 핀 설치됩니다.
참고는 우리가 수행한 여러 가지 스테퍼 모터 드라이버로 사용할 수 있는 대안에 대한 이 모듈은(및 하에서 교체에 많은 응용 프로그램):
- 블랙 에디션 a4988 스테퍼 모터 드라이버 캐리어는 약 20%더 나은 성능으로 제공됩니다.
- 이 MP6500 캐리어 제공할 수 있는 최대 1.5A per phase(continuous)지 않고 히트 싱크와은 두 가지 버전으로 사용할 수 있는데,하나는 냄비를 제어하기 위한 전류 제한 및 중 하나로 디지털 전류 제한 제어에 대한 현재 동적 제한을 조정하여 마이크로 제어기.
- 이 DRV8825 사를 제공합 약 50%더 나은 성능을 통해 더 넓은 전압 범위와는 몇 가지 추가 기능이 있습니다.
- DRV8834 캐리어는 2.5V 의 낮은 모터 공급 전압과 함께 작동하므로 저전압 어플리케이션에 적합합니다.
- 이 DRV8880carrier 제공하는 동적으로 확장 가능한 전류 제한 및”자동조정”는 자동으로 선택합니다 부패 모드 각각의 PWM 주기 위한 최적의 현행 규정에 따라 성능 요소는 다음과 같 motor 권선의 저항과 인덕턴스 모터의 동적인 속도 및 로드입니다.
우리는 또한 판매의 더 큰 버전 A4988 캐리어가 있는 역방향 전원 보호에서 주요 전원 입력 및 built-in5V,3.3V 전압 레귤레이터는 제거에 필요한 별도의 논리와 모터 용품입니다.
일부 단극 댄서 모터(예:사과나 리드)으로 제어할 수 있습이 드라이버으로 양극 댄서 모터입니다. 자세한 내용은 자주 묻는 질문을 참조하십시오. 5 개의 리드가있는 단극 모터는이 드라이버와 함께 사용할 수 없습니다.
포함 하드웨어
다 A4988 스테퍼 모터 드라이버 캐리어 1×16 핀 분리 0.1″남성 헤더. 헤더는 솔더리스 브레드 보드 또는 0.1″암 커넥터와 함께 사용하기 위해 납땜 할 수 있습니다. 모터 리드 및 기타 연결부를 보드에 직접 납땜 할 수도 있습니다. (헤더가 이미 설치되어있는이 보드의 버전도 사용할 수 있습니다.)
|
|
|
를 사용하여 드라이버
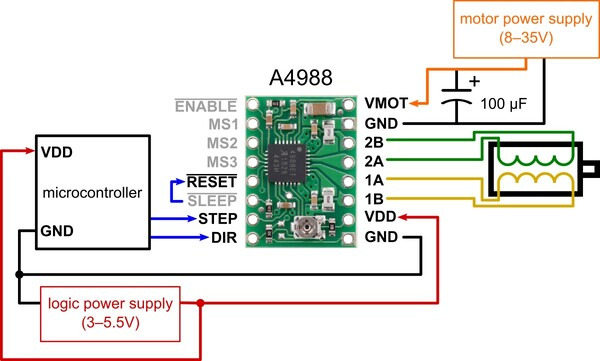
최소의 배선도에 연결하기 위한 마이크로컨트롤러를 A4988 댄서 모터 운전사 캐리어(전체 단계 모드).
전원 연결
드라이버는 로직 공급 전압(3–5.5V)는 VDD 및 GND 핀과 VMOT 및 GND 를 가로 질러 연결될 모터 공급 전압(8–35V)을 가로 질러 연결됩니다. 이러한 공급이 있어야 적절한 디커플링 캐패시터 보드에 가까운,그리고 그들을 제공할 수 있는 예상된 전류(최대 봉우리 4 성공하기 위해 알아야 할 모터 공급).
경고:이 캐리어 널 사용하여 낮은 ESR 세라믹 커패시터,감 파괴적인 LC 전압 스파이크,특히 사용하는 경우 전원 지도상의 몇 인치입니다. 적절한 조건 하에서,이러한 스파이크를 초과할 수 있습 35V 최대 전압에 대한 평가 A4988 고 영구적으로 손상,심지어 경우 모터의 전원 전압은 낮 12V. 방법 중 하나를 보호하는 운전자에서 같은 스파이크를 넣어 가지(적어도 47µF)전해질 축전기 모터에 걸쳐 전력(VMOT)과 땅 어딘가에 가깝습니다.
모터 연결
4 선,6 선 및 8 선 스테퍼 모터는 a4988 에 의해 구동 될 수 있습니다.
경고: 드라이버에 전원이 공급되는 동안 스테퍼 모터를 연결하거나 분리하면 드라이버가 파괴 될 수 있습니다. (더 일반적으로 전원이 공급되는 동안 무엇이든 재배 선하는 것은 문제를 묻는 것입니다.)
단계(및 마이크로 스텝)크기
스테퍼 모터는 일반적으로텝 크기 사양(예:1.8°200 단계별 혁명),에 적용되는 전체 단계가 있습니다. 는 마이크로스텝 드라이버 등과 같은 A4988 높은 해상도로 허용하여 중간 단계에 위치하는 격려해서 달성 코일을 가진 중 현재 수준이다. 예를 들어 운전,모터에서는 분기 단계 모드를 줄 것이 200 단계별 혁명 모터 800microsteps 당 혁명을 사용하여 네 개의 다른 현재 수준이다.
해상도(단계 크기)선택기 입력(MS1,MS2 및 MS3)은 아래 표에 따라 5 단계 해상도에서 선택을 가능하게합니다. MS1 및 MS3internal100kΩ 풀다운 저항기 및 MS2 내부 50kΩ 풀다운 저항기,그래서 떠나고 이 세 가지 마이크로 선택 핀에 연결이 끊어 결과를 전체 단계는 모드입니다. 에 대한 모드 마이크로 제대로 작동하도록 하려면 현재 한도 설정해야 합니다 충분히 낮은(아래 참고)그래서 현재 제한을 가져옵니다. 그렇지 않으면 중간 전류 레벨이 올바르게 유지되지 않고 모터가 마이크로 스텝을 건너 뜁니다.
| MS1 | MS2 | MS3 | 마이크로 해상도 |
|---|---|---|---|
| Low | Low | Low | 전체 단계 |
| 고 | Low | Low | 반 단계 |
| Low | 고 | Low | 기 단계 |
| 고 | 고 | 낮은 | 여덟 번째 단계 |
| 고 | 고 | 고 | 열여섯 번째 단계 |
제어 입력
각 펄스 단계는 입력 중 하나에 해당하는 마이크로의 DIR 핀에 의해 선택된 방향으로 스테퍼 모터. 단계 및 DIR 핀은 내부적으로 특정 전압으로 당겨지지 않으므로 이러한 핀 중 하나를 응용 프로그램에 떠 다니지 않아야합니다. 단일 방향으로 회전 만 원한다면 DIR 을 VCC 또는 GND 에 직접 묶을 수 있습니다. 이 칩에는 RST,SLP 및 EN 과 같은 많은 전력 상태를 제어하기위한 세 가지 다른 입력이 있습니다. 이러한 전원 상태에 대한 자세한 내용은 데이터 시트를 참조하십시오. RST 핀이 뜨는 것을 주의하십시오; 핀을 사용하지 않는 경우 PCB 의 인접한 SLP 핀에 연결하여 보드를 높게 가져와 활성화 할 수 있습니다.
전류 제한
을 극대화 하는 방법 중 하나 댄서 모터의 성능을 사용하는 것으로의 높은 전압을 위해 실용적인 응용 프로그램입니다. 특히,증가하는 전압을 일반적으로 할 수 있습에 대한 더 높은 단계 요금을 밟은 토크 때문에 현재할 수 있는 변경에서 더 빠르게 코일 후 각 단계입니다. 그러나,하기 위해서 안전하게 사용전압이 정격전압의 댄서 모터,코일 현재해야 합 적극적으로 제한된 유지하는 그 초과하는 모터의 정격 전류.
A4988 은 이러한 활성 전류 제한을 지원하며 보드의 트리머 전위차계를 사용하여 전류 제한을 설정할 수 있습니다. 방법 중 하나는 전류 한도를 설정을 드라이버로 전체 단계 모드 및 측정하고 현재 실행 중인을 통해 단 하나 모터 코일을 조정하면서 현재 한계 전위차계입니다. 이것은 모터가 고정 된 위치(즉, 단계 입력을 클럭킹하지 않고). 현재 당신은 측정은의 70%는 실제적인 전류 제한 설정,문 하신 고객님들께 상품에 제한 이 값의 전체 단계 모드고,그래서 당신이 나중에 사용 모드 마이크로 현재를 통해 코일이 될 수 있을 초과이 측정 전체 단계는 현재의 40%(1/0.7)에서 특정 단계;에 주의해 주십시오 때 이 방법을 사용하여 전류 한도를 설정. 또한,주의해야 할 수행이 조정하는 경우 다시 이제까지 변경이 논리 전압,Vdd,이후 참조 전압을 설정하는 전류 제한 기능의 Vdd.
참고:코일 현재의 매우 다를 수 있습니다 전원 공급 장치에서 현재,그래서 당신은하지 않아야 사용이 현재에서 측정된 전력 공급 전류 한도를 설정. 현재 미터를 넣을 수있는 적절한 장소는 스테퍼 모터 코일 중 하나와 직렬로되어 있습니다.
을 설정하는 다른 방법은 현재의 한계를 계산하는 기준 전압에 대응하는 원하는 전류 제한 및 다음 설정한 전위차계할 때까지 측정하는 전압에 VREF pin. Vref 핀 전압은 회로 기판의 하단 실크 스크린에 동그라미 인 via 에서 액세스 할 수 있습니다. 현재 한계,아이 맥스,에 관한 기준 전압은 다음과 같다.
`I_(MAX)=(V_(REF))/(8*R_(CS))`
또는 재배치에 대한 해결하기 위해 VREF:
`V_(REF)=8*I_(MAX)*R_(CS)`
RCS 은 전류 감지 저항; 원래 이 보드를 사용 0.050Ω 전류 감지 저항기,하지만 우리가 사용하여 전환 0.068Ω 전류 감지 저항기에 January2017 년 만드는 이상의 조정을 전위차계의 다양한 유용합니다. 다음 그림을 보여주는 방법을 확인하 전류 감지 저항기 당신의 보드가:
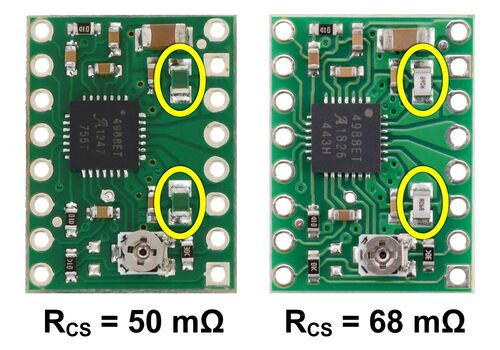
의 식별을 원래의 50mΩ 감지 저항기(왼쪽)및 68mΩ 감지 저항기(바)월에 도입되 2017.
므로,예를 들어,설정하고 싶다면 현재에 제한 1 당신은 보드 68mΩ 감지 저항기,당신이 설정 VREF540mV. 이렇게 하더라도 현재를 통해 각 코일 변화 단계에서 단계로,크기 현재의 벡터 스테퍼 모터에 일관되게 유지됩에서 1:
`sqrt(I_(COIL1)^2+I_(COIL2)^2)=I_(MAX)=1 텍스트로(A)`
경우를 대신하고 싶을 통해 현재 각 코일 1 는 전체 단계 모드 당신은 설정할 필요가 현재한 제한을 40%이상,또는 1.4 기 때문에,코일은 제한을 약 70%의 전류 제한 설정에서 전체 단계 모드(방정식을 위에 보여줍 왜 이것은 경우). 68mΩ 감지 저항이있는 보드로이 작업을 수행하려면 VREF 를 770mV 로 설정하면됩니다.
전력 분산을 고려 사항
A4988 드라이버 IC 최대는 현재 등급의 2 개별 코일이지만,실제로 현재 제공할 수 있습에 따라 얼마나 잘 유지할 수 있습 IC 멋진 있습니다. 캐리어의 인쇄 회로 기판 설계 그리 열 IC,하지만 공급하는 이상 약 1 별 코일,열 싱크 또는 기타의 냉각 방법이 필요합니다.
이 제품은 칩이 과열되기 오래 전에 당신을 태울 정도로 뜨거워 질 수 있습니다. 이 제품 및 연결된 다른 구성 요소를 취급 할 때주의하십시오.전원 공급 장치에서 전류 드로우를 측정하는 것은 일반적으로 코일 전류의 정확한 측정을 제공하지 않습니다. 이후 입력 전류,전압,역기전력 정보를 운전할 수 있는 것보다 훨씬 높은 코일 전압,측정된 전류 전원 공급 장치될 수 있는 아주 조금보다 낮은 코일 전류(운전자와 기본적으로 코일처럼 행동 스위칭 step-down)전원 공급 장치. 또한,경우에는 공급 전압이 매우 높은 것에 비하면 모터의 요구를 달성하는 설정 현재,듀티 사이클은 매우 낮은 것입니다,또한 리드 사이에 유의 한 차이 평균 RMS 전류.
Schematic diagram
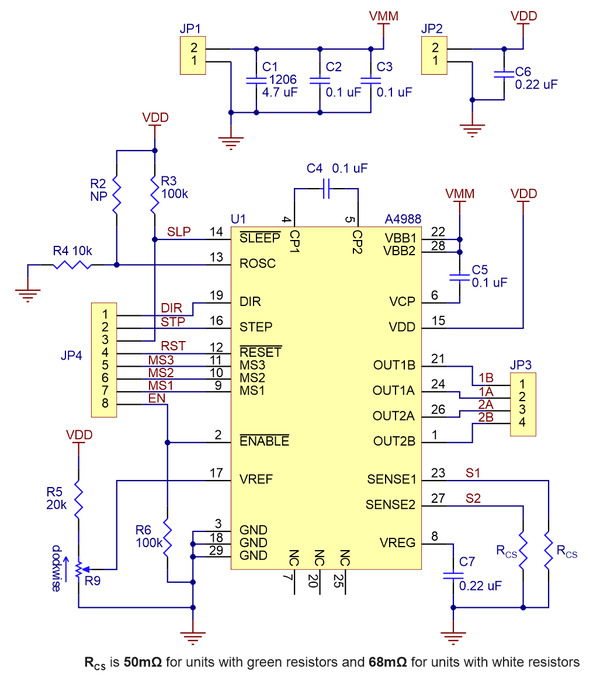
개략도의 A4988 댄서 모터 운전사 캐리어(녹색과 검정 버전).
참고:이 널체에 대한 우리는 원래(그리고 지금 중단)A4983 댄서 모터 운전사 캐리어입니다. 최신 A4988 은 과전류 보호 기능을 제공하며 MS1 마이크로 스텝 선택 핀에 내부 100k 풀다운이 있지만 그렇지 않으면 a4983 과 거의 동일합니다.